Реферат: Построение и исследование динамической модели портального манипулятора
причем ![]() ,
, ![]() и
и ![]() .
.
Решение системы (2.7) имеет вид:
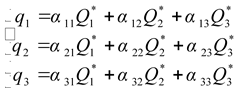 , , | (2.8) |
где
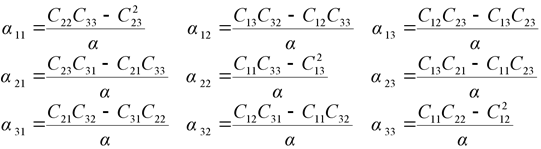 | (2.9) |
 .
.
На систему действуют обобщенные силы, которыми являются инерционные силы и силы сопротивления движению. Обычно в сложных системах в целях упрощения [4, 5] силу сопротивления принимают пропорциональной первой степени скорости движения. С целью упрощения условимся, что угол ![]() мал и координаты массы m можно записать как
мал и координаты массы m можно записать как ![]() . Поэтому на основании кинетостатики можем записать:
. Поэтому на основании кинетостатики можем записать:
| (2.10) |
где ![]() - обобщенная сила,
- обобщенная сила, ![]() - коэффициент сопротивления пропорциональный первой степени скорости движения массы m . Так как масса собственно консоли манипулятора МРЛ-901П меньше массы закрепленных на ней рабочих головок, захватов и деталей, для упрощения примем условие, что точка исследования колебаний (практически - рабочий орган манипулятора) совпадает с точкой приложения сосредоточенной массы m .
- коэффициент сопротивления пропорциональный первой степени скорости движения массы m . Так как масса собственно консоли манипулятора МРЛ-901П меньше массы закрепленных на ней рабочих головок, захватов и деталей, для упрощения примем условие, что точка исследования колебаний (практически - рабочий орган манипулятора) совпадает с точкой приложения сосредоточенной массы m .
Сила ![]() действует на все звенья манипулятора следовательно:
действует на все звенья манипулятора следовательно:
| (2.11) |
Коэффициенты ![]() в (2.7) будем определять из того, что согласно (2.11) звенья можно рассматривать независимо друг от друга. Положим сначала, что
в (2.7) будем определять из того, что согласно (2.11) звенья можно рассматривать независимо друг от друга. Положим сначала, что ![]() действует только по координате
действует только по координате ![]() , затем только по координате
, затем только по координате ![]() и наконец только по координате
и наконец только по координате ![]() , тогда в выражение (2.7) можно переписать:
, тогда в выражение (2.7) можно переписать:
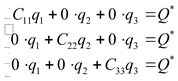 , , | (2.12) |
таким образом ![]() , используя (2.9) находим:
, используя (2.9) находим:
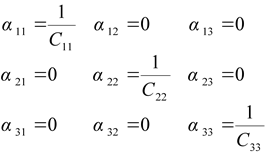 | (2.13) |
Коэффициенты ![]() ,
, ![]() и
и ![]() определяют податливость звеньев манипулятора по координатам
определяют податливость звеньев манипулятора по координатам ![]() ,
, ![]() и
и ![]() соответственно. Выражая податливость звеньев через их жесткость, запишем:
соответственно. Выражая податливость звеньев через их жесткость, запишем:
 , , | (2.14) |
где ![]() ,
, ![]() и
и ![]() жесткости звеньев по координатам
жесткости звеньев по координатам ![]() ,
, ![]() и
и ![]() соответственно.
соответственно.
Подставляя (2.14) , (2.11) и (2.10) в (2.8) получим:
 | (2.15) |
Для решения этой системы нужно выразить скорость и ускорение массы m через их составляющие:
 . . | (2.16) |
Поскольку в манипуляторе суммарную жесткость удобно экспериментально определять, прикладывая соответствующее усилие к его рабочему органу, и так как в конечном итоге необходимо определить положение массы m , координаты которой выражаются как ![]() , то для этого достаточно сложить уравнения в выражении (2.15):
, то для этого достаточно сложить уравнения в выражении (2.15):
 | (2.17) |
или:
 , , | (2.18) |
где С - суммарная жесткость звеньев манипулятора.
Анализ показывает, что величина C является переменной и зависит от плеча приложения l сосредоточенной массы m .
Преобразуя (2.18), получаем уравнение описывающие переходный процесс в системе:
 . . | (2.19) |
Уравнение (2.19) легко решается классическим способом при следующих начальных условиях:
| (2.20) |
где ![]() - скорость рабочего органа манипулятора в момент выхода на конечную точку.
- скорость рабочего органа манипулятора в момент выхода на конечную точку.
Выражение (2.19) представляет собой линейное дифференциальное уравнение второго порядка. Будем искать частное решение уравнения в виде:
| (2.21) |
где ![]() и
и ![]() - произвольные постоянные, которые могут быть определены из начальных условий: при t = 0;
- произвольные постоянные, которые могут быть определены из начальных условий: при t = 0; ![]() и
и ![]() - корни характеристического уравнения:
- корни характеристического уравнения:
 . . | (2.22) |
Решение уравнения (2.22) будет иметь вид:
 | (2.23) |
Определим произвольные постоянные ![]() и
и ![]() , решая систему уравнений:
, решая систему уравнений:
 . . | (2.24) |
Решение системы (2.24) будет иметь вид:
 , , | (2.25) |
если учесть (2.20) то:
 | (2.26) |
подставляя (2.26) в (2.21) и с учетом (2.23) имеем:
 | (2.27) |
где ![]() - реальная часть;
- реальная часть;  - мнимая часть.
- мнимая часть.
Тогда разделяя реальную и мнимую части в (2.27) получим:
 . . | (2.28) |