Реферат: Проектирование манипулятора
Министерство Образования Республики Молдова
Технический Университет
Молдовы
Кафедра КПЭА
Курсовая работа
по дисциплине : Робототехника
тема : Проектирование манипулятора
Выполнил
cт. гр. EI – 972 Сороков А.С.
Проверил
доцент Мардаре И.А.
Кишинёв 2001
Содержание
Задание
Введение 4
1. Кинематическая схема манипулятора 6
2. Описание последовательности движений звеньев
манипулятора 7
3. Форма, размеры и расположение рабочей зоны 8
4. Упрощённая конструкция манипулятора со
связанными системами координат 11
5. Результирующие однородные матрицы преобразований
для каждой точки позиционирования 12
6. Принципиальная электрическая схема устройства управления 16
7. Сборочный чертёж манипулятора в прямоугольной
правосторонней системе координат 17
Заключение 18
Литература 19
CPAE EI 2102 972 17 ПЗ
Манипулятор
UTM FRE
EI - 972

1. Кинематическая схема манипулятора
На рисунке 1 представлена кинематическая схема манипулятора выполненная в правосторонней прямоугольной системе координат.
Индекс подвижности манипулятора : Пх – В z - By
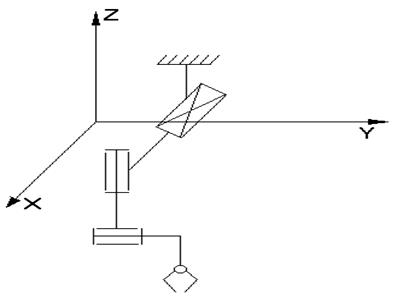
Рис. 1 Кинематическая схема манипулятора

2. Описание последовательности движений звеньев манипулятора
1. В исходном состоянии рабочий орган манипулятора находится в первой точке позиционирования, в начале системы координат. Ни одно из звеньев не совершало движения.
2. Звено один совершает перемещение, в результате чего рабочий орган перемещается из точки один в точку два.
3. Второе звено совершает перемещение, в результате чего рабочий орган поворачивается на 180° и подходит к точке три.
4. Звено один совершает перемещение, при этом рабочий орган перемещается в точку четыре.
5. Второе звено совершает перемещение, в следствии чего, рабочий орган поворачивается на 180° и возвращается в точку один.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--