Реферат: Разработка программы управления промышленным роботом на базе контроллера SIMATIC S5 фирмы SIEMEN
ЕСЛИ нажата кнопка "Тара 2 сменена" (Е33.3 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.5 R=1)
И выключаем " Переполнение тары 2" (А33.3 сигнал 0)
4.4.19 Алгоритм включения меркера М0.7 (сегмент 19)
ЕСЛИ сработал КВ1-2 (Е32.1 сигнал 1)
И-НЕ включен меркер М0.1 (М0.1 сигнал 0)
И "Схват открыт" (А33.1 сигнал 1)
ТОГДА срабатывает счетчик (ZR) (Z2:ZR=1)
И уменьшает свое состояние на 1
ПОКА счетчик не в нуле (Z2:Q=1)
ТОГДА включается меркер М0.7 (М0.7 сигнал 1)
ЕСЛИ включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА счетчик устанавливается в состояние 1 (KZ 001)
ЕСЛИ включен меркер М1.1 (М1.1 сигнал 1)
ТОГДА сбрасывается счетчик Z2(ZR) (Z2:R=1)
4.4.20 Алгоритм включения "Сменить тару 1" (сегмент 20)
ЕСЛИ НЕ включен меркер М0.7 (М0.7 сигнал 1)
И включен меркер М0.0 (М0.0 сигнал 1)
ТОГДА взводится триггер (S/R) (M2.4 S=1)
И включаем "Сменить тару 1" (А33.2 сигнал 1)
ЕСЛИ нажата кнопка "Тара 1 сменена" (Е33.2 сигнал 1)
ТОГДА сбрасывается триггер (S/R) (M2.4 R=1)
И выключаем "Сменить тару 1" (А33.2 сигнал 0)
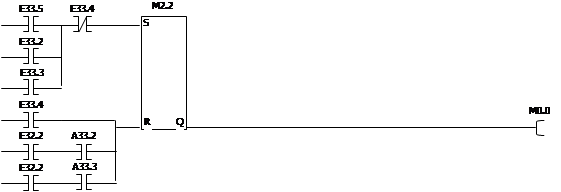
4.5 Представление программы управления роботом-манипулятором в релейно-контактном виде
Сегмент 1
 |
|
 |
|
|
|
 |
|
|
|
|