Реферат: Разработка СУ для двухсцепного манипулятора
 ;
;
![]() ;
;
![]() - ускорение эталонной модели;
- ускорение эталонной модели;
![]() ;
;
![]() ;
;
![]() .
.
Структурная схема самонастраивающейся системы.

![]() .
.
Передаточная функция ![]() на структурной схеме вводится для получения произвольных входных воздействий
на структурной схеме вводится для получения произвольных входных воздействий ![]() и
и ![]() , и ввода их в систему управления. Когда траектория
, и ввода их в систему управления. Когда траектория ![]() задается заранее, то можно вычислить её первую и вторую производные заранее.
задается заранее, то можно вычислить её первую и вторую производные заранее.
Часть 3. Расчет параметров системы (для расчетов используются
данные первой части).
Параметры K , KV и ![]() рассчитывать не надо, они варьируются в широких пределах. Остальные параметры рассчитываются следующим образом:
рассчитывать не надо, они варьируются в широких пределах. Остальные параметры рассчитываются следующим образом:
1) Для первого положения манипулятора: ![]() .
.
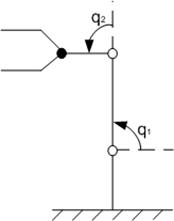
Для этого положения рассчитывается матрица инерции A( q), которая дает значение A0 .
Это положение манипулятора берется за номинальное.
![]() ;
;
![]() ;
;
![]() .
.
![]() .
.
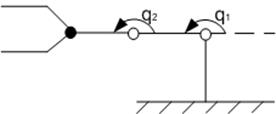
2) Для второго положения манипулятора: ![]() .
.
![]() ;
;
![]() ;
;
![]() .
.
![]() .
.
3) Матрицы ![]() , входящие в выражение для моментов скоростных сил, рассчитываются для первого положения манипулятора, т.к. для второго положения они равны нулю:
, входящие в выражение для моментов скоростных сил, рассчитываются для первого положения манипулятора, т.к. для второго положения они равны нулю:
![]() ,
, ![]() .
.
4) Затем расчет ведется по формуле: ![]() .
.