Реферат: Разработка СУ для двухсцепного манипулятора
Принял : Воронин Ю.Ю.
Москва
2008г.
Дано:
| Последняя цифра шифра | Масса звеньев | Длина звеньев | ||
| М1, кг | М2, кг | L1, м | L2, м | |
| 8 | 10 | 13,5 | 1,8 | 2,5 |
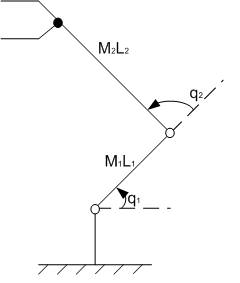
Часть 1. Уравнение динамики двухстепенного манипулятора.
Уравнение динамики в общем виде: ![]() .
.
 , где q – обобщенные координаты.
, где q – обобщенные координаты.
 , где
, где ![]() - управление.
- управление.
A( q) – матрица инерции манипулятора 2х2.
 - моменты скоростных сил.
- моменты скоростных сил.
![]() - симметричные матрицы 2х2.
- симметричные матрицы 2х2.
Для А(q):
![]() ,
,
где ![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для матрицы ![]() :
:
 ,
,
![]() ;
;
![]() ;
;
 ,
,
![]() .
.
При расчете управления потребуются собственные числа матриц ![]() :
:
![]() .
.
Их находят из уравнения: ![]() .
.
Эти числа должны быть вещественные, т. к. матрицы симметричные.
![]()
 ;
;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--