Реферат: Шарнирно-рычажные, фрикционные и зубчатые механизмы: общие сведения и расчеты
Механизмы, входящие в состав любой машины или прибора, весьма разнообразны. С точки зрения их функционального назначения они делятся на следующие виды: механизмы двигателей и преобразователей; передаточные механизмы; исполнительные механизмы; механизмы настройки, подачи, транспортирования; механизмы управления, контроля и регулирования.
Механизмы решают задачи преобразования одних видов движений в другие, например, вращательного в поступательное, и задачи изменения скорости при сохранении вида движения, например, уменьшение числа оборотов двигателя до числа оборотов основного ведомого (рабочего) звена. В последнем случае одним из основных параметров механизма является передаточное отношение i , которое определяется как отношение угловых скоростей ведущего и ведомого k-го звеньев механизма, т.е. i1, k = n1 /nk , или i1, k = ω1 /ωk , где угловая скорость звеньев задается в оборотах за минуту (n ) или в радианах за секунду (ω = 2πn/60). Если механизм служит для понижения угловой скорости, его называют редуктором, если для повышения – мультипликатором.
Механизмы, служащие для передачи вращательного движения с преобразованием скорости (фрикционные, зубчатые), называют также передачами.
В зависимости от конструктивных особенностей и способа передачи движения между подвижными звеньями механизмы делят на шарнирно-рычажные; фрикционные; зубчатые; кулачковые; винтовые; с гибкими звеньями. Рассмотрим подробнее названные виды механизмов, учитывая их кинематические свойства и конструктивные особенности.
1. Шарнирно-рычажные механизмы
В шарнирно-рычажных механизмах жесткие звенья типа стержней, рычагов соединяются вращательными и поступательными кинематическими парами. Шарнирно-рычажные механизмы применяются для преобразования вращательного или поступательного движения в любое движение с требуемыми параметрами. Наибольшее распространение получили плоские четырехзвенные механизмы с тремя подвижными и одним неподвижным звеньями. Родоначальником этой группы является шарнирный четырехзвенник (рис.1), служащий для преобразования равномерного вращения ведущего звена I в неравномерное вращение звена 3. Звенья I и 3 называются кривошипами, если они поворачиваются на угол более 2π, и коромыслами, если совершают качательное движение. Звено 2, совершающее плоское движение, называют шатуном. В зависимости от соотношения длин звеньев механизма рабочее звено 3 может быть кривошипом или коромыслом.
|
|
|
|
|
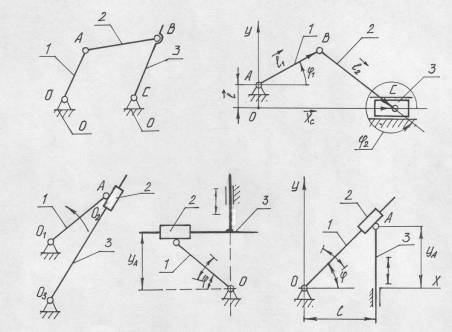
Рис. 3
Широко применяются кривошипно-ползунные механизмы (рис. 2), используемые для преобразования вращательного движения в поступательное и наоборот; с их помощью можно (при равенстве длин кривошипа I и шатуна 2) определить, измеряя перемещение поступательно движущегося звена (ползуна) 3, значения синуса и косинуса угла поворота кривошипа. Конструктивно кривошипно-ползунные механизмы выполняются по двум схемам: внецентральные (рис. 2), у которых линия движения ползуна смещена на эксцентриситет е относительно оси вращения кривошипа; и простые, эксцентриситет которых равен нулю (е = 0).
К четырехзвенным относится большая группа кулисных механизмов, особенностью которых является наличие ползуна, перемещающегося в подвижной направляющей – кулисе (рис. 3, а). Кулиса 3 в зависимости от соотношения размеров звеньев, может совершать вращательное (О1 А > О1 О2 ) или качательное (О1 А < О1 О2 ) движения. Кулисные механизмы позволяют получать большой коэффициент изменения средней скорости ведомого звена (до 2,5) и применяются в системах, требующих быстрого обратного хода.
Разновидностью кулисного является синусный механизм (рис. 3, б). Он преобразует вращательное движение кривошипа I в возвратно-поступательное движение кулисы 3. Название механизма связано с тем, что перемещение y В кулисы 3 пропорционально синусу угла поворота кривошипа φ . На (рис. 3), в показан тангенсный механизм, который позволяет определить тангенс угла поворота кривошипа Itgφ = yВ /l . Применяются и более сложные рычажные механизмы, состоящие из 6 и более звеньев.
2. Фрикционные механизмы
2.1. Общие сведения
Во фрикционных механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих между прижатыми друг к другу телами. Силы прижатия создают пружинами, поджимными винтами, силами тяжести и т.д.
Фрикционные механизмы предназначены для изменения скорости вращательного движения (рис. 4, а) или преобразования вращательного в поступательное движение (рис. 4, в). В зависимости от расположения осей валов фрикционные механизмы классифицируют на механизмы с параллельными (рис. 4, а, в) и пересекающимися (рис. 4 , г) осями; механизмы с нерегулируемым, постоянным (рис. 4, а, г) и регулируемым, плавно изменяемым передаточным (i = var) отношением (рис. 4, б).
Фрикционные механизмы применяются в приводах лентопротяжных, бумагопротяжных устройств, прессах, устройствах транспортирования.
К достоинствам фрикционных механизмов относят простоту конструкции и изготовления, бесшумность в работе, автоматическое предохранение от перегрузок из-за проскальзывания звеньев, отсутствие мертвого хода и возможность плавного бесступенчатого изменения передаточного отношения.
Недостатками фрикционных механизмов являются непостоянство заданного передаточного отношения из-за отсутствия жесткой кинематической связи между ведущим и ведомым звеньями; необходимость наличия нажимных устройств для прижатия тел качения к друг другу; усиленный износ в местах прикосновения из-за больших удельных давлений; сравнительно низкий КПД (0,7 … 0,9); большие нагрузки на валы и опоры, что приводит к необходимости увеличивать их размеры; нагрев при работе.
Движение соприкасающихся звеньев (диски, цилиндрические или конические катки, цилиндры, конуса) фрикционных механизмов сопровождается их относительным скольжением. Различают упругое и геометрическое скольжение, а также буксование.
Упругое скольжение возникает из-за различной упругой деформации ведущего и ведомого звеньев в зоне контакта. Напряжения звеньев в зоне контакта различаются по величине и по знаку. Поверхностные слои ведущего катка 1 (рис. 4, а), нагруженного движущим (вращающим) моментом Мд по мере приближения к площадке ВА контакта сжимаются, а проходя ее – растягиваются. На ведомое звено действует момент сопротивления М2 , направленный в сторону, противоположную направлению момента Мд . В точке А волокна ведущего катка растянуты, а ведомого – сжаты. Под действием сил трения в точке В площадки контакта волокна ведущего катка сжаты, а ведомого - растянуты. В пределах площадки контакта волокна каждого катка меняют свою деформацию, скользя друг по другу. Скорость упругого скольжения составляет 0,2 … 3% от величины окружной скорости катков и увеличивается с увеличением площадки контакта, т.е. с уменьшением модуля упругости материала, поэтому КПД фрикционных передач тем меньше, чем меньше модуль упругости материала катков.
Геометрическое скольжение объясняется наличием разности величин скорости точек касания звеньев фрикционного механизма вдоль линии контакта. Геометрическое скольжение разнотипных передач может быть различным. Рассмотрим геометрическое скольжение между двумя катками конусной формы (рис. 4, г) с несовпадающими вершинами конусов. Чистое качение может быть по линии касания окружностей диаметров d 1 и d 2 . В остальных точках, лежащих по линии АВ контакта катков, наблюдается проскальзывание. Геометрическое скольжение отсутствует, если катки имеют цилиндрическую форму и вращаются около параллельных осей, а также когда вершины (рис. 4, г) образующих конусов катков совпадают.
|
|
|
|
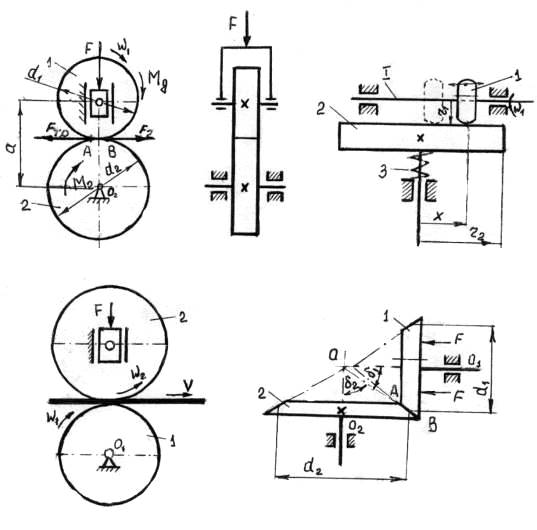
Рис. 4
Кроме рассмотренных видов скольжения возможно буксование – проскальзывание, вызванное нагрузкой передачи. Буксование возникает, когда движущая сила больше величины силы сцепления между звеньями. Оно ведет к местному интенсивному износу поверхности ведомого звена, что нежелательно. Буксование – одна из причин использовать для ведомых звеньев более износостойкий материал, чем материал ведущих звеньев. В этом случае местный износ ведомого звена заменит равномерный износ всей поверхности ведущего звена.
Материалы катков фрикционных механизмов должны иметь высокую контактную прочность и износостойкость для обеспечения необходимой долговечности, значительный коэффициент трения для уменьшения силы нажатия колес; высокий модуль упругости для обеспечения минимального проскальзывания, высокую коррозионную стойкость и теплопроводность. Этим требованиям удовлетворяют легированные стали ШХ15, 18ХН3А, закаленные до HRCэ 56 … 62.
Обычно катки фрикционных передач выполняют из разных материалов, образующих пары с повышенным трением: сталь-сталь, сталь-текстолит, сталь-резина, сталь-асбест и др. Рекомендуется изготавливать ведущий каток из более мягкого материала, что обеспечивает высокий коэффициент трения, меньшую силу прижатия и снижение шума, но при этом получают меньший КПД и большее упругое скольжение.
2.2. Кинематика фрикционных механизмов
С некоторым допущением (упругое скольжение всегда присутствует) считаем, что соприкасающиеся звенья будут катиться друг по другу без проскальзывания и их окружные скорости в месте контакта равны, т.е.
v = v1 = v2 , (1)
где v 1 , v 2 – соответственно линейные скорости точек касания ведущего и ведомого звеньев. Но v1 = (ω1 d1 )/2, а v2 = (ω2 d2 )/2, где ω1 , ω2 – угловые скорости вращения ведущего и ведомого звеньев, а d 1 , d 2 – диаметры катков в месте контакта. Используя зависимость, определим, что передаточное отношение фрикционных механизмов с параллельными (см. рис. 13.1, а) осями без учета упругого скольжения равно
i1,2 = ω1 /ω2 = d2 /d1 = r2 /r1 , (2)
где r 2 , r 1 – радиусы катков.
Во фрикционных механизмах с пересекающимися (см. рис. 4, г) осями звеньев геометрическое скольжение отсутствует при совпадении вершин конусов образующих катков с точкой 0 пересечения осей. Тогда передаточное отношение без учета упругого скольжения
i1,2 = ω1 /ω2 = r2 '/r1 ' = sinδ2 /sinδ1 , (3)
где r 1 ' , r 2 ' – сопряженные радиусы окружностей катков 1 и 2; δ1 , δ2 – углы образующих конусов катков 1 и 2. При пересечении осей О1 и О2 под прямым углом, т.е. при δ1 + δ2 = 90°, выражение можно представить как
i1,2 = ω1 /ω2 = tgδ2 = ctgδ1 . (4)
Во фрикционном механизме (см. рис. 4, г), называемом лобовым вариатором, ведущий ролик 1, вращающийся с постоянной угловой скоростью ω1 , может перемещаться вдоль оси вала I, например, вдоль шлицевого вала. Скорость вращения ω2 диска 2, поджимаемого к ролику 1 пружиной 3, будет плавно меняться. Так как линейные скорости в точке касания ролика и диска равны, т.е. ω1 r1 = ω2 x, где r 1 – радиус ролика; х – расстояние от оси вращения диска до положения ролика, которое может меняться от нуля до радиуса диска r 2 , то передаточное отношение рассматриваемого механизма
--> ЧИТАТЬ ПОЛНОСТЬЮ <--