Реферат: Система автоматической стабилизации пневмоколесной платформы для транспортировки крупногабаритных грузов
1,3
3,0
1,9
4,6
10%
0,9
1,8
1,1
2,5
В данной таблице приняты следующие условные обозначения:
g3 - высота центра тяжести груза;
a* и j* - точность стабилизации соответствующих угловых колебаний.
Данные в таблице показывают, что при транспортировке крупногабаритных грузов не рационально стабилизировать платформу с точностью, превышающей 1°.
Итак, здесь можно сделать следующие выводы:
1. Основным критерием при проектировании системы автоматической стабилизации пневмоколесной платформы является точность стабилизации. Точность стабилизации определяется устойчивостью платформы по опрокидыванию, и допустимым уровнем перегрузок опор.
2. Расчет точности стабилизации проектируемой пневмоколесной платформы позволяет для дальнейших исследований принять, что стабилизировать пневмоколесную платформу достаточно с точностью 1°.
2.3. Анализ существующих методов и средств стабилизации
большегрузных пневмоколесных платформ
Автомобильные перевозки тяжелых и сверхтяжелых негабаритных грузов характеризуются большой сложностью в отношении как их организации, так и технического обеспечения особыми транспортными средствами. Преимущественное распространение в этих перевозках получили автомобильные поезда специализированного производства, обеспечивающие буксирование прицепов общей массой в несколько сотен тонн. Удовлетворить возрастающие требования к таким автопоездам, учитывая их недостатки, все труднее. Этим, видимо, можно объяснить появление нового типа транспортных средств для перевозки сверхтяжелых грузов - многоопорных пневмоколесных платформ (ПКП). Общий вид ПКП представлен на рисунке 2.1.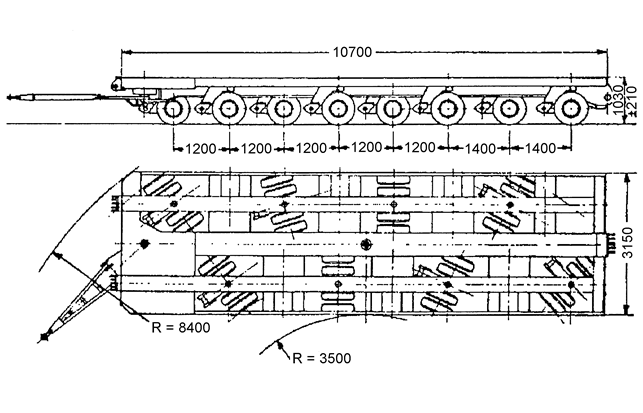
Рис. 2.1. Общий вид ПКП
Возможное число опор ПКП ограничено стандартами, которые заставляют увеличивать нагрузку на опору вплоть до максимальной по несущей способности дороги. В этом случае в качестве подвески приходится использовать гидравлические цилиндры. Известно, что при движении в несвязанных опорах возникает существенный разброс по нагрузкам. Стремление уменьшить разброс нагрузок по опорам (и, следовательно, по дороге) привел к организации балансирных гидравлических связей между гидроцилиндрами опор, делая их как можно обширнее. Поэтому все транспортные средства имеют три или четыре (не более) гидробалансира. Главное назначение балансирных гидравлических связей подвесок в группах и групп по трех- или четырехточечной опорной схеме - обеспечение равномерного распределения вертикальных нагрузок по опорам. При трехточечной структуре подвески (три гидравлических группы) ПКП может двигаться по наиболее неровной дороге благодаря отсутствию изгибных деформаций. При четырехточечной опорной схеме (четыре гидравлических группы) обеспечивается устойчивость, которой обладает обычный двухосный автомобиль нормальной компоновки.
Рассмотрим известные электронные системы стабилизации ПКП. Среди них можно выделить две различные по назначению системы: равномерного подъема и опускания платформы для проведения бескрановых погрузочно-разгрузочных работ и систему стабилизации ПКП, которая обеспечивает горизонтальное положение платформы при движении по дороге.
Наиболее широко используется электронные системы для обеспечения погрузочно-разгрузочных работ. Основным их достоинством является отсутствие необходимости делать поправки на утечки рабочей жидкости.
Система электронного регулирования подъема платформы фирмы Камаг представлена на рисунке 2.2. она рассчитана на транспортные средства с четырьмя гидробалансирами. В каждый гидробалансир включены гидроцилиндры трех опор и специальный гидроцилиндр, который одной полостью соединен с гидрогруппой, а другой полостью через гидравлический распределитель - с гидронасосом. Камера каждого специального гидроцилиндра рассчитана на полный объем гидроцилиндра опор гидробалансирной группы.
Электронная система включает в себя четыре датчика высоты платформы, четыре гидрораспределителя, управляющее электронное устройство и переключатель. 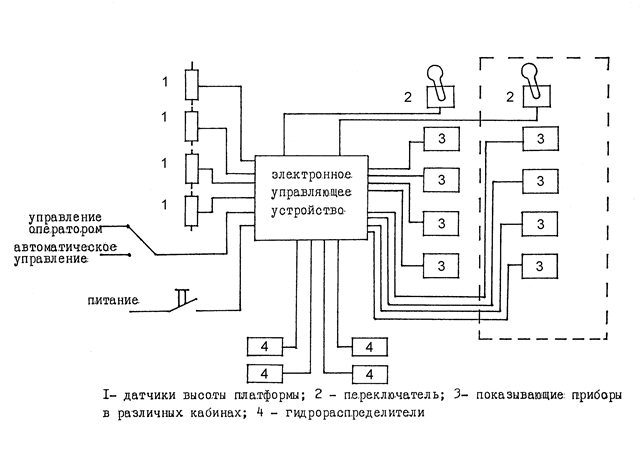
Рис. 2.2. Электронная система автоматического подъема и опускания ПКП фирмы Камаг
Датчики высоты представляют по существу датчики углов потенциометрического типа, которые устанавливаются на одну из опор в группе на рычаг подвески. Угол складывания рычага пропорционален вертикальному положению грузонесущей платформы и, таким образом, потенциометрические датчики углов дают высоту платформы около соответствующей опоры. Переключатель, установленный в кабине водителя, приводит систему в рабочее состояние и отключает ее. Кроме указанных приборов система включает четыре показывающих прибора, отражающих измеренное фактическое значение высоты платформы в четырех точках, также установленных в кабине водителя. Они служат для визуального контроля за подъемом или опусканием платформы. Предусмотрено управление положением платформы в ручном режиме.
При установке переключателя в рабочее положение электронное устройство снимает данные с потенциометрических датчиков углов, сравнивает их между собой и с некоторым заданным значением и выдает сигнал управления на гидрораспределители. Гидрораспределители подают в каждый специальный цилиндр объем рабочий жидкости, пропорциональный входному напряжению, и через них подают масло в гидробалансирные группы.
Недостатками рассмотренной системы управления является невозможность выдержать горизонтальность платформы на негоризонтальной поверхности и несовместимость ее с системой стабилизации ПКП в движении. Однако довольно часто при использовании ПКП в заводских условиях равномерность подъема платформы достаточна для применения такой системы.
Другой основной способ управления подвесками многоопорной ПКП заключается в стабилизации платформы ПКП в горизонтальном положении (горизонтирование). Для примера опишем его использование в автоматизированной системе горизонтирования фирмы "Шаурле", где управление осуществляется под непосредственным контролем оператора. Подобными системами оснащены все многоопорные ПКП.
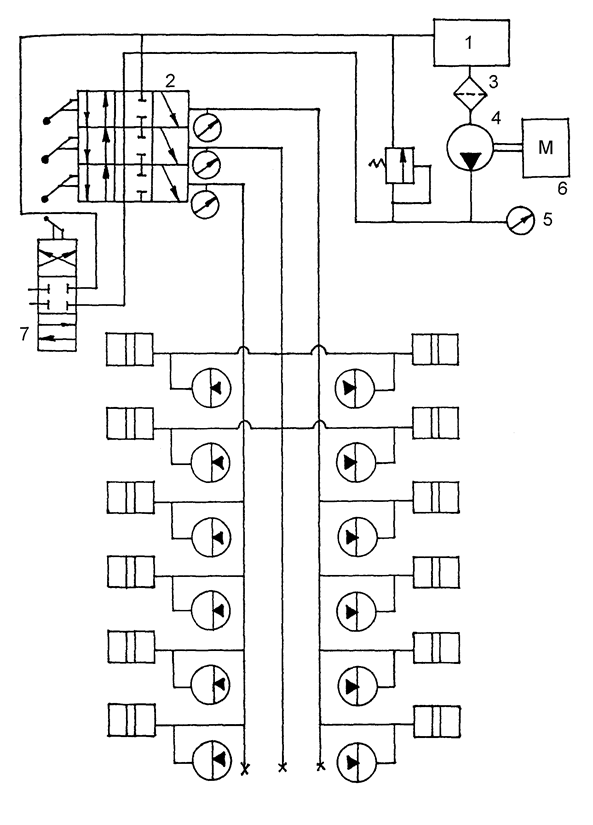
Функциональная схема гидравлической системы подрессоривания и управляющих ею аппаратов приведена на рисунке 2.3. Система горизонтирования приводится в действие насосным агрегатом, который состоит из двигателя внутреннего сгорания, гидронасоса высокого давления, масляного фильтра, предохранительного клапана и манометра, и через блок трехпозиционных гидрораспределителей связана с гидроцилиндрами опор.
На пульте управления в блоке гидрораспределителей установлены четыре рукоятки управления подъемом и опусканием идеальной точки ("гидравлической точки"), отражающей центр силового воздействия группы.