Реферат: Системы стабилизации и ориентации
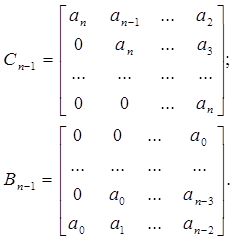
3. Необходимо вычислить определители матриц D+ и D- , а также их внутренние матрицы. Внутренние матрицы получаются из исходных вычеркиванием окаймляющих строк и столбцов. Количество условий устойчивости зависит от порядка системы.
D+ =Cn-1 +Bn-1 ; D- =Cn-1 -Bn-1 ; (1.19)
 (1.20)
(1.20)
Система устойчива, если определители матриц D+ и D- , а также всех её внутренних матриц положительны. Система не устойчива, если не выполняется хотя бы одно из условий устойчивости Кларка.
1.5 Синтез цифровых систем управления по желаемым частотным характеристикам разомкнутой системы
Одно из направлений развития алгоритмических методов синтеза базируется на использовании частотных методов исследования. Процедура машинного синтеза формируется при этом как задача аппроксимации оптимальной в определенном смысле частотной характеристики разомкнутой системы (так называемой желаемой характеристики) исходной характеристикой.
Приближение исходной характеристики к желаемой достигается применением законов управления (корректирующих устройств) минимальной сложности и осуществляется в выбранных характерных точках частот по критерию минимума средних квадратов. При этом под корректирующим устройством минимальной сложности понимается устройство, имеющее наименьшую размерность.
Пусть желаемая АФЧХ разомкнутой системы известна в точках, соответствующих выбранным псевдочастотам lк , к=1,2,…,m
W (j l к )=U к +jV к . (1.21)
Для некоторых значений параметров наперед выбранного закона управления D(z) можно рассчитать АФЧХ скорректированной системы Wск (jlк ) на этих же значениях частоты lк :
W ск ( j l к )= W 0 ( j l к ) D ( j l к )= Re к + jIm к , (1.22)
где W0 (jlк ) - частотная характеристика располагаемой (исходной) системы при l=lк .
Затем следует определить сумму квадратов расстояний между соответствующими точками желаемой и скорректированной частотными характеристиками:
 (1.23)
(1.23)
Минимизируя величину Е с помощью одного из методов поиска экстремума, можно получить наилучшее приближение к желаемой характеристике при выбранном законе управления D(z).
В функционал можно ввести некоторые весовые коэффициенты R(lк ) и рассматривать критерий оптимизации в виде
 (1.24)
(1.24)
При использовании ЛЧХ следует задаваться значениями желаемых характеристик ЛАХ и ЛФХ в m точках для выбранных значений псевдочастоты lк , к=1, 2,…, m и строить критерий как сумму квадратов отклонений ЛАХ и ЛФХ разомкнутой скорректированной системы от желаемой:

где L(lк ) и j(lк ) - значения желаемых ЛАХ и ЛФХ;
Lск (lк ) и jск (lк ) - значения скорректированных ЛАХ и ЛФХ;
R(lк ) и Kn - весовые коэффициенты.
При выборе параметров закона управления по критериям Е, Е1 , Е2 можно варьировать как постоянные времени форсирующих или инерционных звеньев, так и коэффициенты передаточной функции D(z), т.е. задача синтеза сводится к перебору различных структур и параметров, физически реализуемых D(z), и выбору D(z) простейшей структуры.
При машинных методах синтеза в качестве исходных законов управления принимают функции минимальной сложности и увеличивают их размерность до тех пор, пока не будет достигнуто приближение исходной частотной характеристики системы к желаемому виду. В этом случае в качестве исходных передаточных функций последовательного корректирующего устройства можно принимать функции вида
 (1.26)
(1.26)
2 Разработка библиотеки процедур в среде Maple
2.1 Получение дискретной модели непрерывной системы
2.1.1 Процедура diskretA - получение дискретной матрицы состояния.
Формат:
diskretA(А,Т0)
Параметры:
А - матрица состояния непрерывной системы;
Т0 - такт квантования.
Описание:
Процедура вычисляет матрицу состояния дискретной системы по известной матрице состояния размерности (n´ n) непрерывной системы и такту квантования по формуле, приведенной в пункте 1.1. Результатом является матрица такой же размерности.
Пример:
diskretA(matrix(2,2,[0,1,2.268,-0.03]),0.1);
[1.011350092 .1002280116]
[ ]
[.2273171304 1.008343251]
2.1.2 Процедура diskretВ - получение дискретной матрицы управления.
Формат:
diskretВ(А,В,Т0)
Параметры:
А - матрица состояния непрерывной системы;