Дипломная работа: Инструментальное и методологическое обеспечение полигонных и стендовых исследований маневра автотранспортных средств
Скорость движения автомобиля измеряется с помощью тахогенератора переменного тока (рис. 7). Тахогенератор представляет собой статор с тремя соединенными в треугольник обмотками, внутри которого в подшипниках крышек может вращаться ротор. Тахогенератор установлен на фланце поворотного кронштейна «пятого» колеса. Ось ротора тахогенератора связана с осью «пятого» колеса через штифтовое соединение.
В результате вращения ротора при качении «пятого» колеса в обмотках статора наводится ЭДС прямо пропорционально угловой скорости ротора и сдвинутые по фазе на угол 120°. Так как радиус «пятого» колеса практически является величиной постоянной, то тахогенератор можно использовать как датчик линейной скорости центра «пятого» колеса, а, следовательно, и самого автомобиля.
Принцип действия
Сигнал с трехфазного тахогенератора переменного тока подается на двух-полупериодный выпрямитель составленный из шести полупроводниковых диодов.
В схеме предусмотрена регулировка амплитуды выходного сигнала. Для этого выход выпрямителя тахогенератора нагружен переменным резистором.
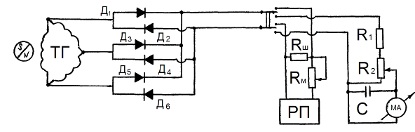
Рис. 7. Электрическая измерительная схема: Д1 – Д2 - Д 226ВП – переключатель, R1 ; R2 ; R3 ; - 4.3 кОмRш – шунтирующее сопротивление, С1 ; С2 ; С3 ; - 1000х25vRм – масштабное сопротивление
Выходной сигнал снимается с одной из крайних точек потенциометра и его движка.
Визуальный контроль скорости движения производится с помощью микроамперметра (стрелочный прибор). Необходимая максимальная амплитуда сигнала скорости регулируется при тарировке датчика. Эту тарировку периодически надо проверять, поскольку возможно случайное смещение движка потенциометра амплитудного регулятора из-за вибрации в автомобиле. Отклонение стрелки микроамперметра протарировано в км/ч.
Регистрирующий прибор – это измерительный механизм самописца, пишущее устройство, которое вычерчивает на бумажной ленте кривую изменения скорости автомобиля, развернутую во времени. Переключатель служит для перехода с визуального контроля на регистрирующий прибор.
Измерение пройденного пути автомобиля
Путь, пройденный автомобилем, измеряется не непосредственно, а путем пересчета по известному числу оборотов «пятого» колеса и его радиусу качения. Обороты прицепного, измерительного колеса фиксирует датчик, который замыкает измерительную электрическую цепь два раза за один оборот колеса. В качестве датчика использован геркон типа КЭМ – ЗА, установленный непосредственно в корпусе тахогенератора (рис. 8).
Для регистрации оборотов «пятого» колеса используется импульсный электрический счетчик (суммирующие приборы). Для четкого срабатывания импульсного счетчика применяется усилитель постоянного тока на базе транзистора КТ – 829, что позволяет облегчить режим работы контактной группы геркона.
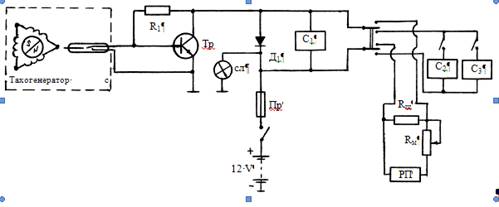
Рис. 8. Электрическая схема канала регистрации импульсов пути, R1 – 3 комТр – кт 829 А, Д1 – Д 226 БСл – сигнальная лампа, С1 ; С2 ; С3 – счетчики импульсовРп – регистрирующий прибор, Rш – шунтирующее сопротивлениеRм – масштабное сопротивление
Принцип действия:
Напряжение постоянного тока ![]() В через тумблер Вк1 подается на усилитель сигнала. О включении питания сигнализирует индикаторная лампа СЛ .
В через тумблер Вк1 подается на усилитель сигнала. О включении питания сигнализирует индикаторная лампа СЛ .
Поворот «пятого» колеса вызывает поворот магнитного поля ротора тахогенератора, что способствует замыканию и размыканию контактов геркона. В момент замыкания контактов транзистор закрывается и прерывает питание катушки электромагнитного счетчика С1 . При размыкании контактов ток течет через резистор R1 и базовый переход транзистора Тр1 в результате чего транзистор открывается и подает питание на обмотку электромагнитного счетчика С1 .
Диод Д применяется для шунтирования обратных выбросов напряжения на электрических обмотках счетчика, которые могут привести к выходу из строя транзистора. При вращении «пятого» колеса циклы включения и выключения повторяются. Счетчик регистрирует число циклов.
Расчет пройденного пути ведется по формуле:
S=L×nк ,
гдеS - пройденный путь;
L - путь пройденный за один оборот «пятого» колеса;
nк - число оборотов «пятого» колеса.
Значение L определяется по формуле:
L=2×p×rк ,
где rк -радиус «пятого» колеса.
Значение nк определяется по формуле:
nк =z/2,
где z - количество импульсов зарегистрированных электромагнитным счетчиком пройденного пути.