Дипломная работа: Инструментальное и методологическое обеспечение полигонных и стендовых исследований маневра автотранспортных средств
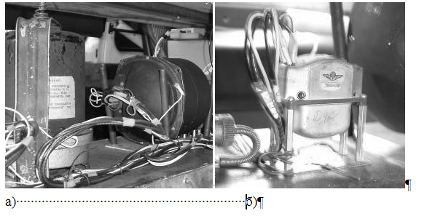
Рис. 15. Гироскопы: а - курсового угла, продольного и поперечного крена; б - угловой скорости автомобиля
Совместно с АЦП для регистрации цифровых сигналов параметров движения используется портативный ПК с предустановленным программным обеспечением (ПО) «PowerGraph 3.1 Professional», позволяющим вести непрерывную запись в режиме реального времени сколь угодно долгий период времени (ограниченный только ресурсами вычислительной системы ПК). ПО «PowerGraph» позволяет использовать персональный компьютер в качестве стандартных измерительных и регистрирующих приборов (вольтметры, самописцы, осциллографы, спектроанализаторы и т.д.).
Отличительными функциональными возможностями данного ПО являются:
- предварительный мониторинг входных сигналов;
- независимая настройка и калибровка каналов;
- поддержка любых скоростей записи;
- эффективная система графического представления больших объемов данных;
- выбор произвольного набора каналов для отображения;
- свободное позиционирование и масштабирование графиков;
- определение параметров сигналов по графикам с помощью скользящих маркеров;
- построение графиков зависимости одного канала от другого;
- построение гистограмм распределения сигналов по амплитуде;
- библиотека статистических и информационных функций анализа данных и др.
Характерной чертой применения ПК и ПО является возможность автоматической регистрации временных интервалов.
УРПД второго комплекса обрабатывает и сохраняет регистрируемые параметры на собственное ПЗУ в течение восьми часов, при этом более старые данные перезаписываются. Таким образом, в любой момент времени имеется возможность получить параметры движения АТС за последние восемь часов. При необходимости регистрации больших периодов времени движения предусмотрено использование съемных носителей информации. Информация о режиме и параметрах движения АТС, записанная таким образом, в дальнейшем может быть перенесена на ПК для расшифровки и детализации проведенных измерений.
Программа испытаний передвижной лаборатории включала следующие режимы движения:
1. Управляемое прямолинейное движение для оценки: интенсивности управления и ширины динамического коридора. То же – с торможением для оценки ширины динамического коридора.
2. Импульсное силовое воздействие на управляемые колеса от неровности дороги для оценки траекторной устойчивости в коридоре движения.
3. Стабилизация (бросок руля) - определение стандартных показателей.
4. Маневр (конечная цель - оценка запаздывания рулевого управления):
4.1. Ступенчатый поворот рулевого колеса (рывок руля).
4.2. Вход в поворот / отворот от препятствия.
4.3. Переставка / объезд неподвижного препятствия.
4.4. Движение по змейке.
Во всех случаях пункта 4 оценка стандартных показателей.
5. Маневр с торможением.
5.1. Переставка / объезд неподвижного препятствия.
5.2. Вход в поворот / отворот от препятствия.