Дипломная работа: Инструментальное и методологическое обеспечение полигонных и стендовых исследований маневра автотранспортных средств
Значения этих показателей в настоящее время доступны к измерению при проведении стендовых испытаний. И в этом аспекте основной проблемой уже является обеспечение адекватности списываемых со стенда показателей их аналогам, измеряемым при дорожных ходовых испытаниях.
В связи с предыдущим замечанием представляется очень важным для дальнейших исследований правильный выбор типа динамического стенда. Все динамические стенды для контроля технического состояния переднего моста и рулевого управления (РУ) можно разделить на 2 группы. С помощью первой группы стендов судят о техническом состоянии этих систем по величине бокового усилия в контакте колеса и измерительного элемента. С помощью второй - непосредственно замеряют положение плоскости качения колеса относительно плоскости симметрии автомобиля.
Обе группы стендов могут быть подразделены с учетом геометрии опорных устройств, типа воспринимающего устройства и конструктивного исполнения. Оценку и выбор стенда из классификационной номенклатуры проводим по методике, разработанной С.С. Селивановым. В качестве критериев оценки были приняты следующие показатели:
- информативность,котораяопределяетсяколичествомсведенийо структурных параметрах узла или агрегата;
- соответствие условий контроля условиям эксплуатации;
- обеспечение автостабилизации колес на стенде;
- возможность, безопасность и удобство проведения регулировочных работ на стенде;
- возможность диагностирования других узлов автомобиля на стенде;
- трудоемкость диагностических операций;
- стабильность и достоверность показаний стенда;
- стоимость стенда;
- надежность и долговечность стенда.
Проведенная оценка по данной методике показала, что наибольшее количество баллов имеют диагностические роликовые стенды с одним или двумя роликами». На втором месте стоят стенды с воспринимающим боковые нагрузки одним из двух опорных барабанов. Отставание в баллах этих стендов от роликовых обусловлено только по показателю информативности, так как они не дают возможности прямого измерения углов развала и схождения управляемых колес.
Однако применение дополнительного устройства, представляющего собой воспринимающий треножник, рамки которого прижимаются к боковине вращающегося колеса, нивелирует указанный недостаток и даже выводит данный тип стендов в наиболее приемлемые для указанных исследований.
Таким образом, исследования снижения некоторых параметров устойчивости и управляемости АТС будем проводить на универсальном динамическом стенде (рис. 21), разрабатываемом на кафедре АСОиБД, (А.С.) за основу механической части которого взят стенд разработки А.А. Филимонова с конструктивными изменениями передней секции.
Колеса передней оси приводятся во вращение передними беговыми барабанами посредством асинхронного электродвигателя. Кроме того, имеется возможность привода от двигателя автомобиля как переднеприводного, так и заднеприводного, через цепную передачу между барабанами передней и задней секций.
Другой немаловажной особенностью данного стенда является возможность самоориентации автомобиля, имеющего непараллельность возможного расположения осей передних и задних колес и барабанов стенда. Без подобной самоориентации измеренные боковые силы на передних управляемых колесах неизбежно будут содержать компоненту, вызванную данной непараллельностью, что осложнит адекватную интерпретацию данных сил для анализа и оценки параметров согласно целей исследования.
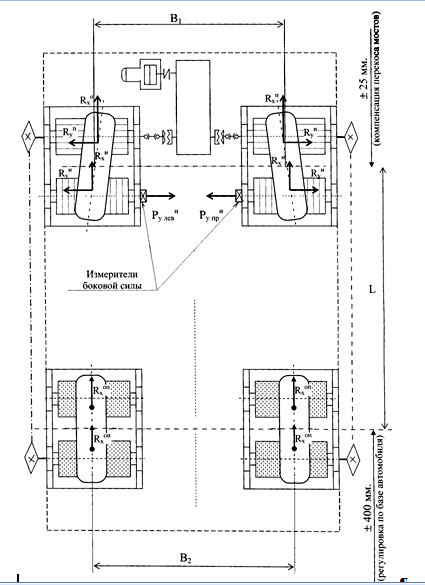
Рис. 21. Схема универсального диагностического стенда
На данном стенде эта задача решена использованием силового метода ориентации автомобиля на стенде, разработанном А. Филимоновым. В его основу положено силовое равновесие колес в поперечном направлении в процессе качения по свободно вращающимся барабанам. Ось ведущих неуправляемых колес всегда перпендикулярна направлению прямолинейного движения автомобиля. Этоможно использовать для точной ориентации автомобиля на стенде при условии, что ведущие колеса установлены на барабанах, оси которых строго параллельны по-перечной оси стенда.
Далее ведущие колеса прокручивают эти барабаны, и в результате взаимодействия сил, возникающих в местах контакта роликов и колес, ведущая ось автоматически при прокрутке занимает положение на стенде, соответствующее прямолинейному движению АТС.
Управляемые же колеса устанавливаются в нейтральное положение по отношению к продольной оси стенда поворотом руля. Причем критерием правильности установки колес в прямолинейное положение в данном случае может служить как уменьшение величины схождения при их отклонении от нейтрального положения, так и равенство боковых сил на измерительных датчиках опорных барабанов.
Проведем теоретический анализ возможности адекватного использования измеряемого значения силы Ри у лев (пр) при аналогичном дорожном испытании курсового угла
Известно, что если на эластичное колесо действует при его качении по плоской поверхности боковая сила Р¶ у , то перемещение центра колеса не будет совпадать с направлением плоскости его вращения, составляя с этой плоскостью угол увода d, который при небольших значениях (до 8°) можно приближенно найти по следующей формуле:
 ,
,
где Кув - коэффициент сопротивления уводу.
Естественно предположить, что если на колесо извне боковая сила не действует, а колесо установлено таким образом, что его направление перемещения образует с плоскостью вращения определенный угол de , a (колесо установлено со схождением и развалом), то в пятне контакта колеса с опорной поверхностью появится боковая сила Р¶ ¢ у , которую также можно выразить зависимостью Р¶ ¢ у =Кув ×de , a .Для конкретного типа шин и условий эксперимента величина Кув будет зависеть от нормальной нагрузки, действующей на колесо. Для практических расчетов можно использовать формулу, предложенную Р. Смилиеем и В. Горном:
Кув =С(А-В×Gк )×Gк ,(1)
где А, В, С - коэффициенты, зависящие от конструкции шины.