Дипломная работа: Ремонт поворотной платформы Техническая характеристика
Рис.2 Кинематическая схема механизма хода
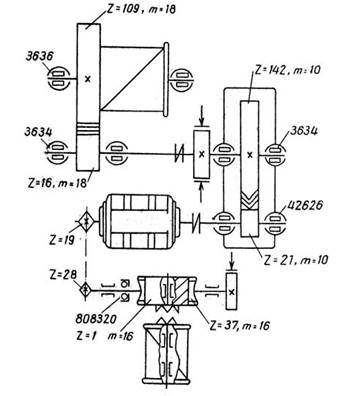
Рис.3 Кинематическая схема подъемной и стреловой лебедки
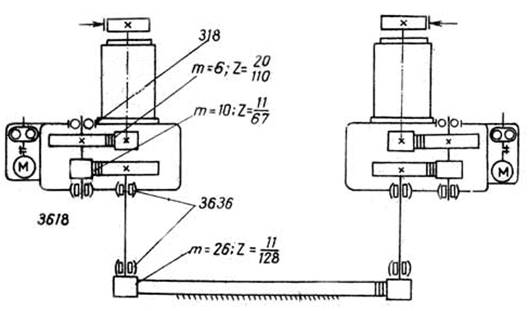
Рис.4 Кинематическая схема механизма поворота
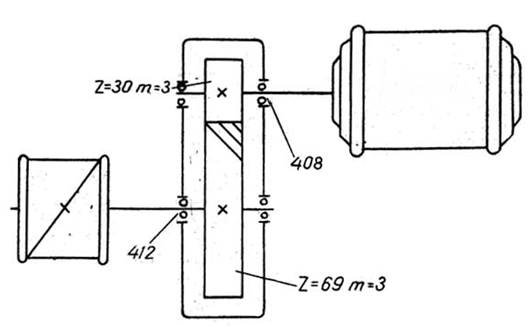
Рис.5 Кинематическая схема механизма открывания днища ковша
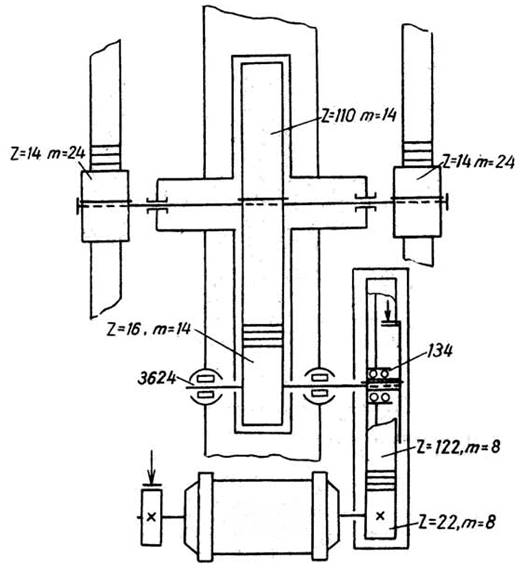
Рис.6 Кинематическая схема механизма напора
1.4 Описание режимов и циклов работы отдельных узлов
Процесс экскавации слагается из отдельных циклов работы экскаватора. В свою очередь цикл работы экскаватора-лопаты состоит из следующих операций: опускание ковша в забой; копание, во время которого производится подъем ковша; поворот платформы к месту выгрузки; открывание днища ковша и разгрузки; возвращение в забой с закрыванием ковша. Во время копания величина снимаемого слоя породы (стружки) и скорость заполнения ковша регулируются увеличением или уменьшением усилия напора, вследствие чего рукоять с ковшом подается в забой или выдвигается из него, изменяя величину снимаемой стружки.
После завершения цикла операции повторяются и совершаются новые циклы, пока не будет полностью разработан слой грунта в зоне копания, что определяется полным выдвижением рукояти. Затем экскаватор передвигается ближе к забою.
Режим работы электроприводов основных рабочих механизмов экскаватора характеризуется большим числом включений, резкими изменениями нагрузки, частыми изменениями направления вращения (реверсированием).
2. Расчетная часть
2.1 Требование к электроприводу механизмов экскаватора
2.1.1 Механизм поворота
Основным требованием к электроприводу механизма поворота является обеспечение протекания переходных процессов в минимально возможное время с ограниченным ускорением или замедлением, в особенности при торможении. Такое требование вызвано тем, что механизм поворота работает исключительно в переходных процессах пуска, реверсирования и торможения, так как он обладает значительной массой, которая в несколько раз превышает маховую массу двигателя. Кроме того, вследствие большого передаточного отношения редуктора механизма поворота могут быть значительные люфты в передачах, что тоже требует плавного разгона во избежание резких ударов в передачах.
2.1.2 Механизм подъема
Механизм подъема работает в условиях резко переменной нагрузки, значительно превышающей номинальную. В отдельных случаях нагрузка может быть настолько велика, что возникает опасность разрушения отдельных звеньев механической передачи.
2.1.3 Механизм напора
Еще тяжелее условия работы механизма напора. Наиболее характерной особенностью работы этого механизма является возможность его вынужденной остановки во время работы в случае встречи ковша с непреодолимым препятствием. Такой режим работы называется работой на упор или стопорением. Следовательно, для обеспечения надежной и безаварийной работы рабочего механизма требуется снижение момента (нагрузки) до допускаемых пределов при стопорении и известная податливость его приводного двигателя (мягкость характеристики), с тем чтобы скорость двигателя могла быть автоматически замедлена при достаточно большом увеличении нагрузки.
2.2 Выбор рода тока и величины питающих напряжений
На экскаваторах средней мощности применяются многодвигательный электропривод постоянного тока, который имеет преобразовательную установку, состоящую из трехфазного сетевого (приводного) двигателя и нескольких генераторов постоянного тока – для питания двигателей главных механизмов. Для вспомогательных механизмов применяются асинхронные двигатели с короткозамкнутым ротором.
В качестве приводного двигателя и для вспомогательных механизмов применяются асинхронные двигатели с короткозамкнутым ротором.
Энергия к экскаватору, находящемуся в забое, подводится гибким четырехжильным кабелем, подключаемым через передвижной приключательный пункт к внутрикарьерной линии электропередач на напряжение – 6 кВ. По трем жилам кабеля осуществляется питание электрооборудования, а четвертая жила служит для надежного заземления корпуса экскаватора.
Питание двигателей вспомогательных механизмов осуществляется на напряжение 0,4 кВ, получаемое от трансформатора собственных нужд, установленном в передвижном приключательном пункте.
2.3 Выбор системы электропривода и методов регулирования скорости
Требуемые механические экскаваторные характеристики приводов главных рабочих механизмов экскаватора легче всего осуществить, когда каждый главный рабочий механизм : подъем, поворот, напор или тяга, оборудуются двигателем постоянного тока независимого возбуждения, питающихся от отдельного источника питания – генератора постоянного тока, напряжение которого можно плавно регулировать от нуля до полной величины ± Uг с помощью реостата. Такая система регулируемого электропривода называется системой генератор – двигатель и сокращенно обозначается Г-Д.
Генераторы приводятся во вращение приводным (или, как принято его называть, сетевым) двигателем , частота вращения которого не изменяется. В качестве приводного двигателя, на карьерных экскаваторах применятся асинхронные двигатели с короткозамкнутым ротором.