Дипломная работа: Сенсоры для навигации мобильного робота
В системах такого типа используется принцип электромагнитной индукции, взаимодействия между генерируемыми и наводимыми магнитными полями. На этом принципе, в частности, основаны навигационные системы, предназначенные для управления подвижными роботами, перемещающимися вдоль уложенных на поверхности (или под ней) металлических шин.
Генератор высокочастотных колебаний ГВК и индукционная катушка ИК создают в пространстве высокочастотное магнитное поле. В уложенной на поверхности металлической шине Ш индуктируется наведенное магнитное поле, под действием которого в катушках К1 и К2 генерируются переменные напряжения. Обмотки катушек включены последовательно и встречно, поэтому выходное переменное напряжение равно разности напряжений, наводимых в катушках. Если шина расположена симметрично относительно катушек, то суммарное напряжение ![]() будет равно нулю. Если шина окажется расположенной несимметрично, т.е. появится угловое отклонение β центра катушек от оси шины, то возникает разность напряжений
будет равно нулю. Если шина окажется расположенной несимметрично, т.е. появится угловое отклонение β центра катушек от оси шины, то возникает разность напряжений ![]() . При изменении знака β будет меняться фаза этого напряжения. В приемнике Пр напряжение
. При изменении знака β будет меняться фаза этого напряжения. В приемнике Пр напряжение ![]() усиливается, фильтруется и подается на фазочувствительный выпрямитель ФЧВ, постоянно выходное напряжение U которого пропорционально амплитуде разностного переменного напряжения, а знак определяется фазой этого напряжения.
усиливается, фильтруется и подается на фазочувствительный выпрямитель ФЧВ, постоянно выходное напряжение U которого пропорционально амплитуде разностного переменного напряжения, а знак определяется фазой этого напряжения.
Исходя из описанного принципа действия, индукционная система относится к классу систем непрерывных, работающих по разомкнутому циклу, а по составу элементов – к электромагнитным.
1.1.4 Радиационная угломерная система
Для измерения координат объектов в условиях запыленности, отсутствия освещения, в специальных средах могут применяться источники радиоактивного излучения, располагаемые на объекте. В этом случае измеритель работает в пассивном режиме, используя поток радиоактивных частиц в качестве источника информации. Наличие потока частиц делает такие системы дискретными, а случайные моменты излучения – дискретными со случайным периодом следования импульсов. В основе построения радиационных систем лежит принцип измерения интенсивности излучения в точке приема, т.е. оценки средней частоты появления импульсных сигналов.

Рисунок 1.3 – Радиационная угломерная система
Радиационная угломерная система имеет два канала измерения (рис. 1.3), включающих коллиматоры излучения и детекторы КД, усилители-формирователи импульсов УФ, сглаживающие фильтры СФ и схему вычитания сигналов СВ. Напряжение с СВ подается на двигатель Д , поворачивающий платформу П с коллиматорами в направлении на источник излучения U так, чтобы он находился на оси коллиматоров. Система работает по принципу измерения рассогласования θ между направлением на источник β и угловым положением платформы у. Для получения напряжения, пропорционального рассогласованию, коллиматор выполнен в виде цилиндра из материала, поглощающего излучение. В качестве детектора обычно используют комбинацию из сцинтиллирующего кристалла и фотоумножителя, ионизационные камеры или полупроводниковые структуры. При различных углах θ положения источника И , относительно, оси коллиматора интенсивность ν зарегистрированного излучения будет различной. Зависимость интенсивности от θ называется диаграммой направленности коллиматора.
1.2 Системы измерения дальности и скорости
1.2.1 Акустическая дальномерная система
Импульсные ультразвуковые дальномеры нашли широкое применение на практике, в том числе при очувствлении роботов. Измерение дальности в ней основано на оценке времени запаздывания отраженного сигнала относительно момента его излучения. Дальность определяется по формуле: ![]() , где
, где ![]() – скорость распространения ультразвуковых колебаний, зависящих от своей среды; τ – время запаздывания отраженного сигнала.
– скорость распространения ультразвуковых колебаний, зависящих от своей среды; τ – время запаздывания отраженного сигнала.
Импульсы имеют длительность ![]() и излучаются передатчиком периодически через интервал
и излучаются передатчиком периодически через интервал ![]() . На рис. 1.4 изображена функциональная схема дальномерной системы, в которой Пд – передатчик, Пр – приемное устройство, ВД – временной дискриминатор, УФ – усилительные и фильтрующие элементы, СС – схема сравнения, ГС – генератор стробов, ГПН – генератор пилообразного напряжения.
. На рис. 1.4 изображена функциональная схема дальномерной системы, в которой Пд – передатчик, Пр – приемное устройство, ВД – временной дискриминатор, УФ – усилительные и фильтрующие элементы, СС – схема сравнения, ГС – генератор стробов, ГПН – генератор пилообразного напряжения.
Отраженный от объекта О сигнал принимается, усиливается, детектируется в приемном устройстве и в форме видеоимпульса подается на временной дискриминатор. Этот импульс задержан относительно начала отсчета, совпадающего с моментом излучения, на время τ. В то же время на выходе системы существует напряжение U , пропорциональное уже измеренному на предыдущих периодах излучения значению дальности r, которое поступает на схему сравнения. На второй вход схемы подается сигнал с ГПН, который запускается импульсами передатчика в момент их излучения. ГПН вырабатывает линейно возрастающее напряжение до момента излучения следующего импульса, а затем процесс периодически повторяется.

Рис 1.4 – Акустическая дальномерная система
Система измерения дальности работает по замкнутому циклу и относится к системам дискретного действия потому, что носителями полезной информации о дальности до объекта в ней являются импульсные сигналы.
1.2.2 Лазерная дальномерная система
Использование лазерного излучения особенно перспективно в системах измерения дальности до элементов поверхности протяженных объектов, поскольку высококогерентное оптическое излучение позволяет формировать узкие световые пучки. Благодаря этому световое пятно на поверхности объекта оказывается небольшим и удается обеспечить высокое разрешение элементов поверхности.
На рис. 1.5 изображена функциональная схема лазерной дальномерной системы с непрерывным излучением. Лазерный генератор ЛГ оптического сигнала работает в непрерывном режиме и излучает оптический сигнал, проходящий через модулятор. В модуляторе сигнал по интенсивности моделируется периодическим сигналом ![]() , вырабатываемым генератором моделирующего сигнала ГМС. Луч света после модулятора отражается от сканирующего зеркала СЗ в направлении элемента поверхности, до которого измеряется дальность. Отраженный сигнал поступает в оптический приемник ОП и после него в виде напряжения
, вырабатываемым генератором моделирующего сигнала ГМС. Луч света после модулятора отражается от сканирующего зеркала СЗ в направлении элемента поверхности, до которого измеряется дальность. Отраженный сигнал поступает в оптический приемник ОП и после него в виде напряжения ![]() подается на фазовый детектор. Фаза этого напряжения
подается на фазовый детектор. Фаза этого напряжения ![]() пропорциональна дальности r до точки отражения.
пропорциональна дальности r до точки отражения.
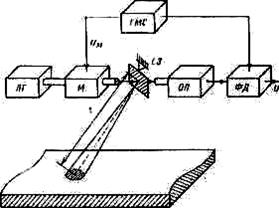
Рисунок 1.5 – Лазерная дальномерная система
Рассмотренная система относится к классу непрерывных, работающих по разомкнутому циклу управления.
1.2.3 Радиационная дальномерная система
Определение дальности до источника радиоактивного излучения основано на измерении интенсивности ν принятого излучения и последующем вычислении дальности, исходя из формулы 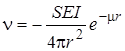 , где I – активность источника; S – площадь детектора; Е – эффективность детектора; μ – коэффициент линейного поглощения среды.
, где I – активность источника; S – площадь детектора; Е – эффективность детектора; μ – коэффициент линейного поглощения среды.
Навигационное устройство построено по схеме, изображенной на рис. 1.6, где И — источник излучения на расстоянии r от локатора; КД1 и КД2 – коллиматоры с детекторами, расположенными на интервале d друг относительно друга; УФ – усилители-формирователи сигналов; СФ – сглаживающие фильтры; СД – схема деления напряжений; ФП – функциональный преобразователь; у – измеренное значение дальности r .
Рисунок 1.6 – Радиационная дальномерная система
Это навигационное устройство работает по принципу разомкнутого цикла и по составу элементов относится к классу электронных систем, так как все операции в нем производятся над электрическими сигналами. Недостатком системы является необходимость предварительного знания коэффициента поглощения среды. Чтобы избавиться от этой необходимости, систему можно строить по трехканальной схеме.
1.3 Системы поиска и обнаружения