Дипломная работа: Сенсоры для навигации мобильного робота
Если первоначальное положение объекта относительно системы неизвестно или известно с определенной долей вероятности, то этапу измерения координат предшествует этап поиска и обнаружения. Он необходим для решения вопроса о том, находится или отсутствует в зоне действия навигационной системы объект, и если он имеется, то каковы его координаты. Предварительное знание координат объекта на этапе поиска необходимо для наведения на объект систем измерения. При этом немаловажное значение имеют величины ошибок первоначальной сценки координат при поиске. Функциональная схема системы изображена на рис. 1.7.
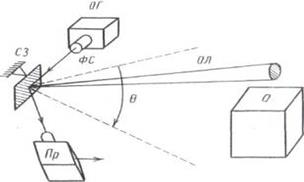
Рисунок 1.7 – Оптическая система поиска по угловым координатам
Узкий оптический луч ОЛ формируется с помощью оптического генератора ОГ, фокусирующей системы ФС и с помощью сканирующего зеркала СЗ перемещается в горизонтальной плоскости в секторе θ с угловой скоростью ![]() . Если в секторе θ и в пределах дальности действия системы находится объект О , то отраженный от него сигнал преобразуется, усиливается в приемнике Пр и в виде напряжения U выдается на индикатор. Наличие шумового сигнала связано с наличием шумов приемного устройства и излучением фона. Напряжение U подается на устройство автоматического обнаружения полезного сигнала. В простейшем случае это пороговое устройство с уровнем срабатывания
. Если в секторе θ и в пределах дальности действия системы находится объект О , то отраженный от него сигнал преобразуется, усиливается в приемнике Пр и в виде напряжения U выдается на индикатор. Наличие шумового сигнала связано с наличием шумов приемного устройства и излучением фона. Напряжение U подается на устройство автоматического обнаружения полезного сигнала. В простейшем случае это пороговое устройство с уровнем срабатывания ![]() . При достижении напряжения U этого уровня выдается сигнал о наличии объекта в зоне поиска. Из-за шумов и фоновых помех процедура поиска и обнаружения имеет статистический характер, в результате чего возможны пропуски полезного сигнала или ложная остановка поиска из-за шумового выброса.
. При достижении напряжения U этого уровня выдается сигнал о наличии объекта в зоне поиска. Из-за шумов и фоновых помех процедура поиска и обнаружения имеет статистический характер, в результате чего возможны пропуски полезного сигнала или ложная остановка поиска из-за шумового выброса.
1.3.2 Акустическая система поиска по дальности
Принцип действия акустической системы поиска по дальности такой же как и принцип акустической дальномерной системы. Только тут обработка информации идет иным способом.
За каждый период излучения ![]() выбрасывается один строб – импульс поиска длительностью
выбрасывается один строб – импульс поиска длительностью ![]() . С помощью схемы селекции строб – импульс «вырезает» из выходного напряжения приемника U участок длительностью
. С помощью схемы селекции строб – импульс «вырезает» из выходного напряжения приемника U участок длительностью ![]() и формирует новое напряжение
и формирует новое напряжение ![]() , пропорциональное площади «вырезанного» участка. Это напряжение запоминается на время
, пропорциональное площади «вырезанного» участка. Это напряжение запоминается на время ![]() до следующего периода работы системы. В новом периоде строб – импульс вырабатывается с задержкой на время
до следующего периода работы системы. В новом периоде строб – импульс вырабатывается с задержкой на время ![]() равное его длительности, и в новь определяется значение напряжения
равное его длительности, и в новь определяется значение напряжения ![]() . Весь цикл в интервале времени от нуля до
. Весь цикл в интервале времени от нуля до ![]() занимает
занимает  периодов излучения импульсов. Если в строб – импульс попадают только шумы, амплитуда напряжения
периодов излучения импульсов. Если в строб – импульс попадают только шумы, амплитуда напряжения ![]() будет небольшой и случайной величиной, статически независимой от соседних значений. Если же в строб попадает полезный сигнал, то амплитуда сигнала возрастает.
будет небольшой и случайной величиной, статически независимой от соседних значений. Если же в строб попадает полезный сигнал, то амплитуда сигнала возрастает.
Описанная система поиска по дальности в принципе не отличается от системы поиска по угловым координатам, за исключением дискретного характера сигнала на входе порогового устройства.
2. Разработка системы навигации мобильного робота
2.1 Системы планирования и их задания
Как известно, интеллектуальными (или интегральными) роботами называются автоматические устройства третьего поколения, что должны функционировать в динамическом замкнутом мире, имеют касательное и зрительное восприятие окружающего мира, владеют возможностями мобильности и изменения внешнего пространства. Кроме того, системы управления интегральных роботов должны функционировать на основе моделирования окружающего мира, выбора решения задачи, исходя из поставленной цели и динамических изменений в окружающем мире.
Для обеспечения разрешения подобных проблем служат решение интеллектуальных задач. Наиболее популярными разработками в этой области является GPS (General Problem Solver), который предназначен для решения преимущественно математических заданий и STRIPS (Stanford Research Institute Problem Solver), что с самого начала планировалась как система заданий адаптивных (а потом интеллектуальных) роботов.
Система планирования интеллектуальных роботов в своей основе базируется на разработке интеллектуальных решений. Построение теории интеллектуальных решений предусматривает решение двух проблем:
а) описание решения, его знаний и деятельности;
б) построение теории интеллектуальных решений.
Решение интеллектуальных заданий в наше время практически является преимуществом человека. Очевидно, человек пользуется своим внутренним языком преподавания знаний, что позволяет ему упрощать модель своего внутреннего мира и осуществлять при их помощи эффективный поиск необходимых решений с тесным взаимодействием с достаточно полно описанной моделью окружающего мира. Таким образом, при построении решения необходимо описывать не только модели решения, но и модель функционирования человека в процессе принятия решений.
Описание системы планирования – это в первую очередь описание закономерностей умственной деятельности такой системы при решении сложных проблемных заданий. Эта деятельность должна включать процессы осведомления системой планирования ситуаций окружающего внешнего мира и выполнять действия, также процессы поиска решения заданий. Таким образом, описание системы планирования, её знаний и деятельности, должно содержать:
а) описание исполнительных органов решения;
б) описание внешнего окружения;
в) описание знаний системы планирования, что отображают понимание деятельности исполнительных органов и окружающей среды решения;
г) описание процессов поиска решений предложенных заданий.
2.2 Общие аспекты построения системы планирования
Практическая реализация планирующих систем должно предвидеть наличие самой подсистемы планирования и исполнительной подсистемы. Так система STRIPS по замыслу должна работать в реальном мире во взаимодействии с исполнительной системой PlanEX (plan execution – исполнение планов).
Проблемная среда системы планирования содержит модель мира, набор операторных систем и цель (или набор целей) системы. В случае постановки задачи для мобильного робота в замкнутом пространстве мир робота должен соответствовать схеме расположения объектов в этом пространстве, например рис. 2.1.
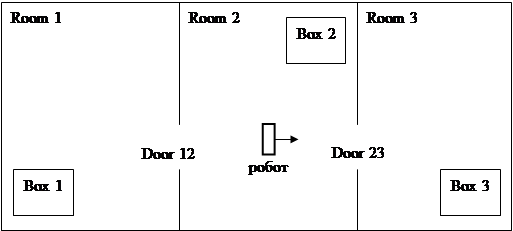
Рисунок 2.1 – Пример схемы расположения объектов для системы планирования робота
Для решения практических заданий необходимо автоматически формировать абстрактные пространства разных уровней с базового пространства объектов и событий, в котором функционирует система.
В STRIPS – подобных системах абстрактные пространства определяются уровнем детализации условий применения операторов. Такой подход позволяет:
а) оставить неизменяемую модель мира – нет необходимости вычеркивать из неё незначительные (для данного уровня абстракции) детали и не учитывать их;