Контрольная работа: Динамический анализ механизмов долбежного станка
Схема механизма и исходные данные
Механизмы долбежного станка
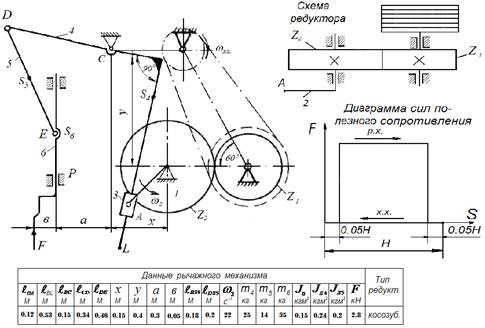
Долбежный станок предназначен для долбления пазов и внутренних канавок в отверстиях. Для движения ползуна с резцом используется шестизвенный кривошипно-кулисный механизм OALBCDEP с качающейся кулисой. Кривошип 2 получает вращательное движение от электродвигателя через клинно-ременную передачу и горизонтальный одноступенчатый редуктор с цилиндрическими колесами. Вращательное движение кривошипа преобразуется в возвратно-поступательное движение ползуна 6 через качающуюся вокруг опоры С кулису 4 с камнем 3 и шатун 5. Ход ползуна Н выбирается в зависимости от длины обрабатываемой поверхности детали с учетом перебегов 0.05Н в начале и конце рабочего хода (см. диаграмму сил полезного сопротивления). Рабочий ход ползуна 6 совершается за больший промежуток времени, чем холостой ход, и соответствует большему углу поворота кривошипа.
Кинематический анализ и выбор электродвигателя
Планы положения мех – ма и силы полезного сопротивления
Выбрав масштаб ![]() построили 8–9 планов положений механизма при общем изображении стойки. Пусть ОА=35 мм, тогда
построили 8–9 планов положений механизма при общем изображении стойки. Пусть ОА=35 мм, тогда



Сначала определили крайнее положение механизма перед рабочим ходом и начиная от него построили 6–8 планов положений механизма соответствующих положениям ведущего звена механизма. Определили 2-ое крайнее положение звеньев механизма и построили для него план механизма. Построили диаграмму усилий, действующее на исполнительное звено, и если необходимо, построили 2 плана положений соответствующие началу и концу действия сил полезного сопротивления.
Структурный анализ механизма
1. Выписываем кинематические пары определяя класс и вид
1–2 – вращ., 5 кл
2–3 – вращ., 5 кл
3–4 – поступ., 5 кл
4–1 – вращ., 5 кл
4–5 – вращ., 5 кл
5–6 – вращ., 5 кл
6–1 – поступ., 5 кл

2. Определяем степень подвижности
W=3n-2p5 – p4 =3*5–2*7=1
3. Строим структурную схему механизма

--> ЧИТАТЬ ПОЛНОСТЬЮ <--