Контрольная работа: Система координат
Итак, положение какой-либо точки в пространстве может быть определено только по отношению к каким-либо другим точкам. Та точка, относительно которой рассматривается положение других точек, называется точкой отсчете . Мы так же применим и другое наименование точки отсчета – точка наблюдения . Обычно с точкой отсчета (или с точкой наблюдения) связывают какую-либо систему координат , которую и называют системой отсчета. В выбранной системе отсчета положение КАЖДОЙ точки определяется ТРЕМЯ координатами.
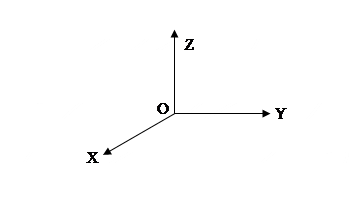
Правая декартова (или прямоугольная) система координат
Эта система координат представляет собой три взаимно перпендикулярных направленных прямых, называемых так же осями координат , пересекающихся в одной точке (начале координат). Точка начала координат обычно обозначается буквой О.
Оси координат носят названия:
1. Ось абсцисс – обозначается как OX;
2. Ось ординат – обозначается как OY;
3. Ось аппликат – обозначается как OZ
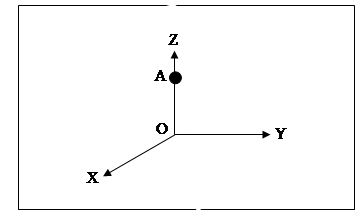
Теперь объясним, почему эта система координат называется правой. Давайте посмотрим на плоскость XOY с положительного направления оси OZ, например из точки А, как это показано на рисунке.
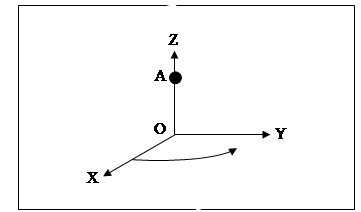
Предположим, что мы начинаем поворачивать ось OX вокруг точки О. Так вот – правая система координат имеет такое свойство, что, если смотреть на плоскость XOY из какой-либо точки положительной полуоси OZ (у нас – это точка А), то, при повороте оси OX на 90 против часовой стрелки, её положительное направление совпадет с положительным направлением оси OY.
Такое решение было принято в научном мире, нам же остается принимать это так, как оно есть.
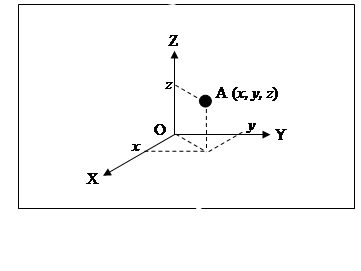
Итак, после того, как мы определились с системой отсчета (в нашем случае – правой декартовой системой координат), положение любой точки описывается через значения её координат или другими словами – через величины проекций этой точки на оси координат.
Записывается это так: A(x, y, z), где x, y, z – и есть координаты точки А.
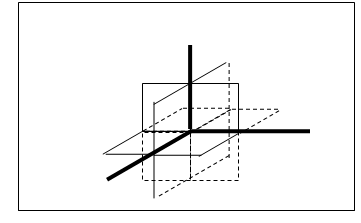
Прямоугольную систему координат можно представить себе, как линии пересечения трех взаимно перпендикулярных плоскостей.
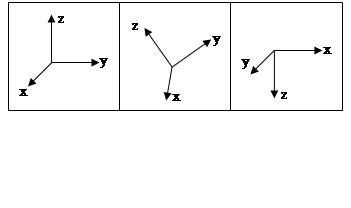
Следует заметить, что ориентировать прямоугольную систему координат в пространстве можно как угодно, при этом надо выполнить только одно условие – начало координат должно совпадать с центром отсчета (или точкой наблюдения).
Сферическая система координат
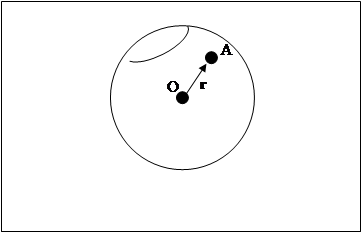
Положение точки в пространстве можно описать и другим способом. Предположим, что мы выбрали область пространства, в котором располагается точка отсчета О (или точка наблюдения), и еще нам известно расстояние от точки отсчета до некоторой точки А. Соединим эти две точки прямой ОА. Эта прямая называется радиус-вектором и обозначается, как r . Все точки, имеющие одно и тоже значение радиус-вектора, лежат на сфере, центр которой находится в точке отсчета (или точке наблюдения), а радиус этой сферы равен, соответственно радиус-вектору.
Таким образом, нам становится очевидным, что знание величины радиус-вектора не дает нам однозначного ответа о положении интересующей нас точки. Нужны еще ДВЕ координаты, ведь для однозначного определения местоположения точки количество координат должно равняться ТРЕМ.
Далее мы поступим следующим образом – построим две взаимно перпендикулярные плоскости, которые, естественно, дадут линию пересечения, и эта линия будет бесконечной, потому как и сами плоскости ничем не ограничены. Зададим на этой линии точку и обозначим ее, ну например, как точка О1. А теперь совместим эту точку О1 с центром сферы – точкой О и посмотрим, что получается?
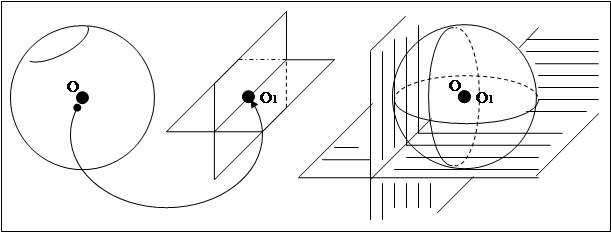
А получается очень интересная картина:
· Как одна, так и другая плоскости будут центральными плоскостями.
· Пересечение этих плоскостей с поверхностью сферы обозначат большие круги
· Один из этих кругов – произвольно, мы назовем ЭКВАТОРОМ , тогда другой круг будет называться ГЛАВНЫМ МЕРИДИАНОМ.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--