Контрольная работа: Структурный и кинематический анализ рычажного механизма
![]() ,
,
где n – количество подвижных звеньев, n = 3;
Р 5 – количество пар пятого класса, Р 5 = 4.
Составим структурные группы механизма и определим их класс и порядок:
а ) стойка 0 - кривошип 1 – механизм I класса, начальный механизм (рис. 3)
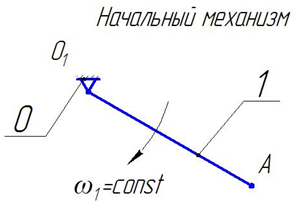
Рис. 3 Механизм I класса (0;1)
б ) ползун 2 – кулиса 3 – двухповодковая группа Ассура 3 вида (ВПВ) (рис. 4)
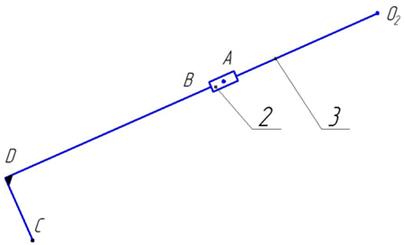
Рис. 4 2ПГ 3 вида (2;3)
Таким образом, исследуемый механизм, обладающий одной степенью подвижности (W = 1), можем рассматривать как образованный путем последовательного присоединения к стойке 0 и ведущему звену 1 одной группы, состоящей из звеньев 2,3. По классификации И.И. Артоболевского он должен быть отнесен к механизмам II класса.
Формула строения механизма
I(0;1)→II3 (2;3).
2. Синтез механизма
Длина кривошипа О 1 А задана: ![]() 0,5 м.
0,5 м.
Определим длину кулисы О2 D :
![]()
Расстояние O 1 O 2 :
![]()
Расстояние CD :
![]()
По найденным значениям длин механизма, строим план положения механизма. Масштабный коэффициент длины рассчитываем по формуле:
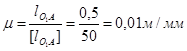
где ![]() – действительная длина кривошипа О 1 А ,
– действительная длина кривошипа О 1 А , ![]() 0,5 м;
0,5 м;
![]() – масштабная длина кривошипа О 1 А , принимаем
– масштабная длина кривошипа О 1 А , принимаем ![]() = 50 мм.
= 50 мм.
Масштабная длина кулисы О2 D :
![]()
Масштабное расстояние [![]() ]:
]:
![]()