Контрольная работа: Структурный и кинематический анализ рычажного механизма
![]()
Методом засечек в принятом масштабе µ строим план положения механизма для заданного положения кривошипа О 1 А , φ 1 = 30° (рис. 5).
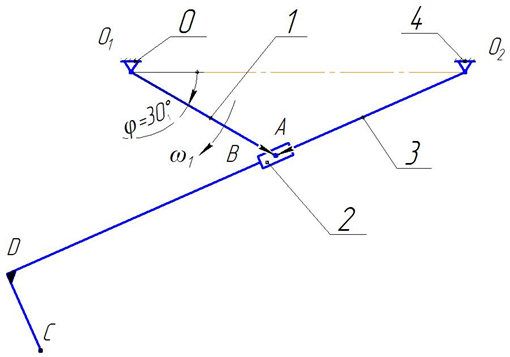
Рис. 5 План положения механизма, µ = 0,01 м/мм
3. Кинематический анализ рычажного механизма
Построение плана скоростей .
План скоростей строим для заданного положения механизма, для φ 1 = 30° (рис. 5). Построение плана скоростей начинаем с ведущего звена (кривошип О 1 А ), закон движения которого задан. Последовательно переходя от механизма I класса к структурной группе 3 вида, определим скорости всех точек звеньев механизма.
Угловая скорость кривошипа O 1 A задана и считается постоянной:
ω 1 = 20 рад/с = const.
Линейная скорость точки А кривошипа О 1 А
![]()
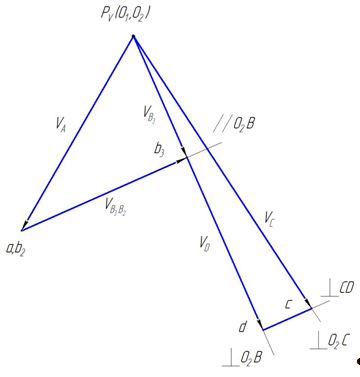
Рис. 6 Построение плана скоростей, µv = 0,1 м·с-1 /мм
Из точки Рv , принятой за полюс плана скоростей откладываем в направлении вращения кривошипа вектор скорости точки А кривошипа О 1 А ![]() (рис. 6). Длину вектора линейной скорости точки А , вектор
(рис. 6). Длину вектора линейной скорости точки А , вектор![]() , выбираем произвольно.
, выбираем произвольно.
Принимаем ![]() = 100 мм, тогда масштабный коэффициент плана скоростей равняется
= 100 мм, тогда масштабный коэффициент плана скоростей равняется
![]()
Чтобы определить скорость точки В кулисы 3, составим векторное уравнение:
![]() ,
,
где ![]() – вектор абсолютной скорости точки В , направленный перпендикулярно О2 В;
– вектор абсолютной скорости точки В , направленный перпендикулярно О2 В;
![]() – вектор относительной скорости точки В , направленный параллельно О2 В;
– вектор относительной скорости точки В , направленный параллельно О2 В; ![]() .
.
Получим отрезки, которые изображают на плане скоростей вектор абсолютной скорости точки В –![]() = 59,1 мм и относительной скорости точки В –
= 59,1 мм и относительной скорости точки В –![]() = 80,7 мм.
= 80,7 мм.
Абсолютная скорость точки В:
![]()
Относительная скорость точки В:
![]()
Для нахождения скорости точки D , принадлежащей кулисе О2 D , восполь-зуемся теоремой подобия
 ,
,