Курсовая работа: Анализ САР регулирования частоты вращения приводного электродвигателя стенда для обкатки ДВС
Выполнил: студент 3 курса
11 ЭПТ группы
Давыденков М. А.
Проверил: Дудников И.Л.
Минск 2008 г.
Введение
Цель работы: закрепление базовых знаний по курсу «Основы автоматики» на примере проведения анализа системы автоматического регулирования.
Задание:
Дать краткую характеристику объекта управления, описать устройство и работу системы, составить её функциональную схему. Сделать вывод о принципе автоматического управления, использованном в системе, и виде системы.
Составить структурную схему системы.
Определение закона регулирования системы.
Определить передаточные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запасы устойчивости.
Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой системы.
Провести совместный анализ измерения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
Оценить качество управления по переходным функциям.
Сделать общие выводы по работе.
Данные согласно варианту задания сводим в табл. 1.
Таблица 1. Исходные данные.
| вариант | схема | К1 | К2 | Т1,с | Кд | Тд, с | Ку | Кдв | Кр | Кв | Кп | Тдв, с |
| 13 | 20 | 50 | 0,4 | 4 | 0,1 | 0,1 | 50 | 0,002 | 0,1 | 5 | 5 | 0,5 |
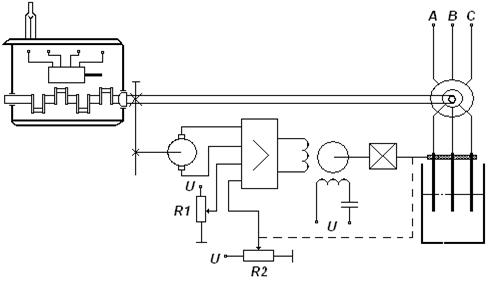
Рис.1 САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
1. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы. Принцип автоматического управления и вид системы
САР частоты вращения приводного электродвигателя стенда для обкатки ДВС состоит из объекта управления и регулятора.
Объектом управления (ОУ) рассматриваемой САР является асинхронный электродвигатель с фазным ротором. Регулируемой величиной является частота вращения вала двигателя ω. Целью управления является поддержание частоты вращения ω на заданном уровне путем изменения сопротивления в цепи ротора асинхронного электродвигателя. Управляющим воздействием на ОУ является угол поворота вала, присоединенного к реостату, φр. Основное возмущающее воздействие изменение момента сопротивления Мс на валу двигателя.
1. Датчиком (Д) является тахогенератор постоянного тока Uд. Входной сигнал для тахогенератора – частота вращения вала двигателя, выходной сигнал – напряжение Uд датчика.
Задатчиком системы является сопротивление R1. Задающий сигнал – это величина напряжения U3, которое в определенном масштабе соответствует заданному значению частоты вращения вала ω.
2. Дифференциальный усилитель (ДУ) 2 выполняет так же и функции сравнивающего устройства (СУ), сравнения (вычитания) входных сигналов и усиления их разности. На вход усилителя поступают напряжения задатчика UЗ , напряжение с тахогенератора UД и Uос устройства обратной связи. Выходной сигнал усилителя - напряжение Uу, подаваемое на электродвигатель 3.
3. Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя (Дв) 3 и редуктора (Р) 4. Входной сигнал для электродвигателя – напряжение Uу, выходной сигнал – угол поворота φдв вала электродвигателя. Входной сигнал для редуктора - φдв, выходной сигнал - угол поворота вала φр редуктора.
4. Устройство местной обратной связи (УОС) выполнено в виде потенциометрического датчика (6). Входной сигнал УОС – угол поворота φр, выходной сигнал – напряжение Uос.
5. Регулирующим органом (РО) является жидкостной реостат 5 который изменяет сопротивление в роторе электродвигателя 7. Входной сигнал – угол поворота φр, выходной сигнал – сопротивление Rф.
На основании вышеизложенного составлена функциональная схема системы, которая приведена на Рис.2.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--