Курсовая работа: Анализ САР регулирования частоты вращения приводного электродвигателя стенда для обкатки ДВС

Получаем
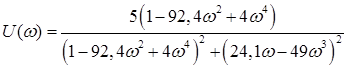

Результаты расчета сводим в табл. 2.
Таблица 2. Результаты расчета для построения АФЧХ.
| 0 | 0,005 | 0,01 | 0,05 | 0,08 | 0,1 | 0,15 | 0,2 | 0,6 | 0,8 | |
| 5 | 4,93 | 4,764 | 1,895 | 0,539 | 0,0684 | -0,41 | -0,5 | -0,15 | -0,087 | |
| 0 | -0,596 | -1,158 | -2,954 | -2,511 | -2,115 | -1,32 | -0,82 | -0,02 | 0,009 |
5.3 Определяем запас устойчивости САР:
Запас устойчивости по амплитуде для данной САР ![]() =0,82 , по фазе -
=0,82 , по фазе - ![]() , что удовлетворяют рекомендованным величинам запасов устойчивости по амплитуде и по фазе.
, что удовлетворяют рекомендованным величинам запасов устойчивости по амплитуде и по фазе.
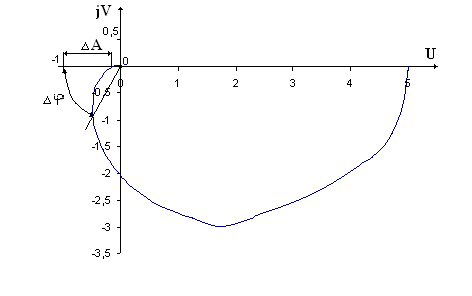
Рис. 4 АФЧХ разомкнутой системы
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
Воспользуемся передаточной функцией для ошибки по управляющему воздействию, полученной в разделе 4 для нашей системы:

В статистике р обращается в ноль, поэтому:
![]()
Таким образом:
![]()
где К - коэффициент передачи разомкнутой системы.
После подстановки численного значения K получим ![]() .
.
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему.
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
Воспользуемся передаточными функциями объекта управления и системы по возмущающему воздействию.
![]()

В статике р обращается в ноль, поэтому для объекта:
![]()
![]()
Для системы:
![]()
![]()