Курсовая работа: Автоматическая система управления процессом испытаний электропривода лифтов
На кинематической схеме элементов передач нагрузочного ЭП приняты следующие обозначения:
1 – АД нагрузочного моментного ЭП,
2 – зубчатый ремень,
3 – датчик скорости, установленный на валу АД нагрузочного ЭП,
4 – цилиндрическая передача колесо-шестерня,
5 – понижающий редуктор с коэффициентом i=33.64,
6 – датчик положения, установленный на выходном валу редуктора,
7 – датчик момента, развиваемого испытуемым ЭП,
8 – редуктор, входящий в состав испытуемого ЭП,
9 – АД испытуемого ЭП.
Для целей исследования и создания полной имитационной модели асинхронного нагрузочного ЭП необходимо учесть особенности механической конструкции стенда. Элементы передач представляет собой сложную многомассовую систему с упругими связями и зазорами. Основная упругость в данном случае сосредоточена в зубчатом ремне, что позволяет легко перейти от многомассовой механической системы к эквивалентной двухмассовой системе. Расчётная схема двухмассовой системы передач применительно к нагрузочному моментному асинхронному ЭП представлена на рисунке 3.
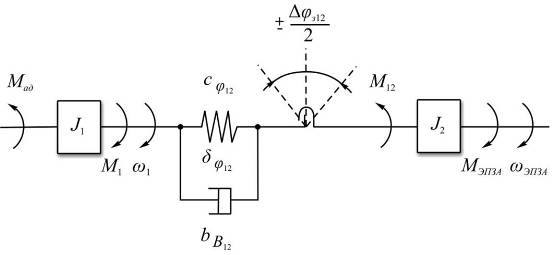
Рисунок 3 – Расчётная схема двухмассовой системы передач нагрузочного ЭП
1.3 Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Схема технологического процесса испытаний электропривода лифтов представлена на рисунке 4:
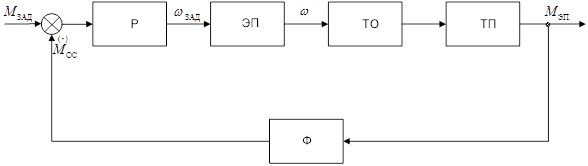
Рисунок 4 – Схема технологического процесса испытаний электропривода лифтов
На данной схеме представлены следующие обозначения типовых блоков:
Р – регулятор;
ЭП – электропривод, включающий питающую сеть, совместно с трансформатором, необходимым для согласования напряжений питающей сети и двигателя; приводной двигатель и преобразователь;
ТО – технологическое оборудование, включающее все необходимое оборудование, непосредственно участвующее в технологическом процессе;
ТП – технологический процесс;
Ф – формирователь момента, включенный в обратную отрицательную связь на вход задающего воздействия – в данном случае это тензометрический датчик момента.
Основными технологическими переменными являются:
- Мзад – задающее воздействие, характеризующее требуемую величину нагрузочного момента, создаваемого нагрузочным двигателем;
- ωзад – сигнал задания скорости с выхода регулятора Р (управляющее воздействие), пропорциональный задающему воздействию;
- ω – сигнал управления (переменная состояния ЭП), формируемый электроприводом для управления технологическим оборудованием;
- М – выходное значение нагрузочного момента (переменная состояния ТП), отработанное замкнутым контуром схемы технологического процесса;
- Мос – сигнал отрицательной обратной связи, поступающий с блока формирования момента.