Курсовая работа: Автоматическая система управления процессом испытаний электропривода лифтов
Технологический процесс состоит в следующем: задающее воздействие Мзад суммируется с сигналом обратной связи Мос, поступающим с тензометрического датчика момента и поступает на регулятор Р, на выходе которого формируется сигнал задания скорости ωзад, пропорциональный значению входного сигнала Мзад-Мос (ошибки по управлению ε). Сигнал задания скорости ωзад является управляющим воздействием для электропривода ЭП, задатчик скорости которого формирует сигнал напряжения управления Uу и подает на вход системы управления преобразователем, который, в свою очередь управляет двигателем и приводит его во вращение с скоростью ω. Далее приводной двигатель, работающий с заданной скоростью ω, приводит в движение редуктор который преобразует величину входного момента и формирует выходной сигнал Мэп.
На рисунке 5 представлена структура системы векторного управления нагрузочным асинхронным ЭП для случая работы в режиме упора. Система базируется на имитационной модели АД во вращающихся координатах, сориентированных по вектору потокосцепления ротора и представляет собой классическую структуру векторного управления с дополнительным внешним контуром положения. Для поддержания высокой стабильности характеристик и максимального быстродействия используется режим работы при задании постоянного потокосцепления ротора.
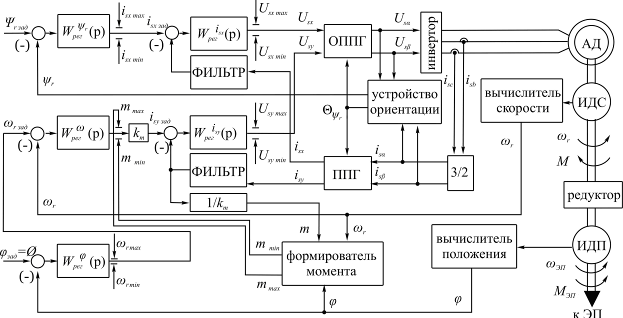
Рисунок 5 – Структура системы управления нагрузочным ЭП
На рисунке 5 приняты следующие обозначения:
ППГ – преобразователь Парка-Горева,
ОППГ – обратный преобразователь Парка-Горева,
3/2 – модуль преобразований из трёхфазной системы статорных токов в составляющие пространственного вектора,
ИДС – импульсный датчик скорости,
ИДП – импульсный датчик положения,
Для минимизации взаимного влияния между перекрёстными контурами
управления потокосцеплением ротора и скорости использовано их преднамеренное разделение по быстродействию. Для решения задачи косвенного определения переменных параметров АД, недоступных для прямого измерения, но необходимых для организации качественного векторного управления использовано устройство вычисления переменных на базе обращённой имитационной модели АД с автоматической системой для компенсации внешних возмущений.
1.4 Классификация и перечень измеряемых переменных состояния, определение требуемой точности управления технологическим процессом. Определение условий работы измерительных устройств
На микроконтроллер возложены функции мониторинга состояния системы осуществляемого с помощью датчиков тока статора АД. Контроль за положением и скоростью системы выполняется с помощью импульсных квадратурных датчиков положения (ДП), установленном на выходном валу ЭП, и скорости (ДС), расположенном на валу АД.
Устройства получения информации о состоянии технологического процесса предназначены для сбора и преобразования информации без изменения ее содержания о контролируемых и управляемых параметрах ТП. Входом устройств являются естественные или унифицированные сигналы, выходом – соответствующие значения унифицированных сигналов.
К устройствам для получения информации о состоянии процесса, образующим канал сбора и преобразования информации, относят чувствительные элементы или собственно датчики.
Датчики физических величин воспринимают контролируемый параметр и преобразуют его в величину, удобную для передачи по каналам связи или дальнейшего преобразования.
Основными характеристиками измерительных устройств для получения информации о состоянии ТП (датчики) являются: входная величина, воспринимаемая и преобразуемая датчиком; выходная величина, используемая для передачи информации; статическая и динамическая характеристики датчика; порог чувствительности; основная и дополнительные погрешности.
Измерительные устройства, входящие в состав АСУ:
1. Встраиваемая в ПЭВМ многофункциональная плата ввода/вывода PC104
фирмы Fastwell;
2. Комплект измерительных датчиков тока Honeywell типа K591-001
3. Источник питания датчиков типа ПБ-96
4. Инкрементный датчик положения (энкодер) – 2 шт.
5. Тензометрический датчик момента KYOWA TP-E
6.Программное обеспечение: операционная система Windows-XP, инструментальная система для разработки прикладного ПО Visual C++, прикладные программы.
Данный метод обеспечивает измерение, с погрешностью не более 1,5 %, следующих величин: переменного тока в фазах нагрузочного двигателя, частоты вращения приводного двигателя, частоты вращения испытуемого ЭП, положения вала испытуемого двигателя.
В процессе проведения испытаний измеряются и регистрируются следующие параметры:
Нагрузочного двигателя: токи в фазах двигателя, частота вращения двигателя.