Курсовая работа: Електромеханічний привід виконуючого механізму
Полтавський національний технічний університет імені Юрія Кондратюка
Електромеханічний факультет
Кафедра обладнання нафтових та газових промислів
КУРСОВИЙ ПРОЕКТ
з дисципліни:
“Основи конструювання механічної частини електроприводів”
на тему:
“Запропонувати електромеханічний привід виконуючого механізму”
Варіант №6
Вступ
В цій РПЗ приведені деякі розрахунки електромеханічного приводу ланцюгового транспортера.
Ланцюговий транспортер це — машина неперервної дії для переміщення кускових або штучних вантажів, яка широко застосовується при механізації та автоматизації промислових процесів в різних галузях народного господарства.
Ланцюговий транспортер (рис.1) виконаний у вигляді двох зірочок: ведучої 1 та веденої 2, через які перекинуто транспортерний ланцюг 3. Ведена зірочка має натяжний пристрій гвинтового типу 4. Тяговим та вантажонесучим органом у ланцюгового транспортера є ланцюг 3 та напрямлячі-опори 5, які розташовані як під верхньою, так і під нижньою гілками ланцюга. Швидкість руху ланцюга коливається від 1 до 8 м/с в залежності від виду транспортуємого вантажу та умов експлуатації.
Проектуємий електропривід буде передавати обертовий рух ведучій зірочці 1.
Транспортні пристрої забезпечують неперервність технологічних процесів, тому до них застосовують особливі вимоги по надійності та довговічності. У зв’язку з цим оптимальним приводом для ланцюгового транспортера буде електричний привід з асинхронним електродвигуном змінного струму, який має суттєву перевагу у порівнянні з іншими видами приводів (гідравлічним та пневматичним).
Приводи з асинхронними двигунами широко розповсюджені в робототехнічних та технологічних комплексах. Це пояснюється тим, що асинхронні двигуни мають просту конструкцію, надійні в експлуатації, дешевші, значно легші та менші за розмірами від електричних двигунів іншого типу.
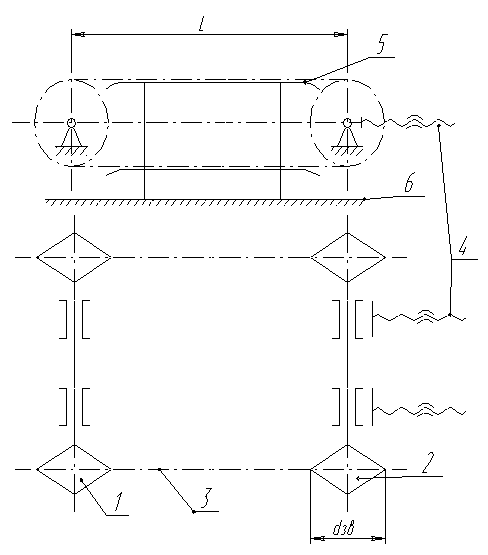 |
???. 1. ʳ????????? ????? ??????????? ????????????:
1 — зірочка ведуча,
2 — зірочка ведена,
3 — ланцюг транспортний,
4 — пристрій натяжний,
5 — направляючі,
6 –– станина.
Враховуючи викладене вважаємо, що основною метою цього проекту є розробка такої конструкції передаточного механізму електроприводу, яка б відповідала всім вимогам, що ставляться в технічному завданні.
Для успішного вирішення поставленої задачі в проектуємому передаточному механізмі необхідно використати якомога більше число серійно виготовляємих складових частин, що мають гарантовану заводом-виробником надійність та довговічність.
1. Опис будови та принципу дії електроприводу
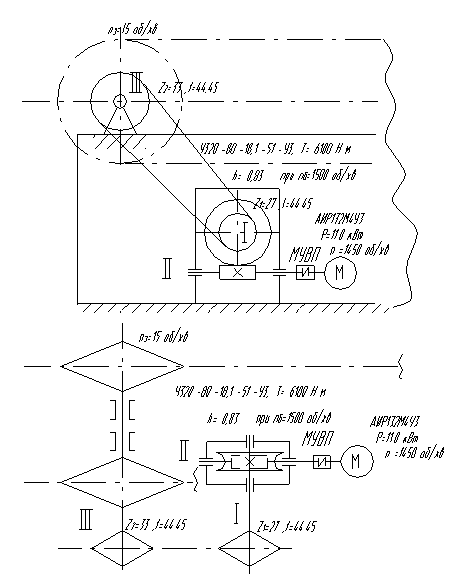
В результаті техніко-економічного аналізу (див. розділ 4) вибрано кінематичну схему розробляємого електроприводу (рис.2).
Електропривід включає двигун М, який за допомогою пружної втулочно-пальцевої муфти МУВП з’єднаний з вхідним валом черв’ячного редуктора Ч250. На вихідний вал черв’ячного редуктора насаджено зірочку Z1 , яка за допомогою втулочно-роликового ланцюга Ц з’єднана з веденою зірочкою Z2 , що закріплена на валу ведучої зірочки ланцюгового транспортера. Ланцюгова передача має натяжний ролик НР.
Електродвигун з черв’ячним редуктором змонтовані на окремій рамі, тобто виконані у вигляді самостійного блоку, який розташований під холостою гілкою стрічкового транспортера. Така компоновка електропривода відповідає принципам блочно-модульної побудови машин, дозволяє вписатися в габарити ланцюгового транспортера та дає можливість зручного обслуговування складових частин електропривода при експлуатації.
Технічна характеристика електропривода
1. Номінальний обертовий момент на вихідному валу, Нм —6180;
2. Частота обертання вихідного вала, об/хв — 17;
3. Електродвигун — АИР160S6У3, Р = 11,0 кВт, n = 970 об/хв;
4. Редуктор — Ч-250-50-19,4-51-У3, Твих = 4120 Нм при nб = 1000 об/хв;
5. Габаритні розміри, мм ![]() довжина —1312, ширина —648, висота —760;
довжина —1312, ширина —648, висота —760;
6. Маса, кг ~600.
 |
???.2. ʳ????????? ????? ?????????????? ??????????? ????????????:
2. Попередній вибір електродвигуна
--> ЧИТАТЬ ПОЛНОСТЬЮ <--