Курсовая работа: Исследование метода дифференцирования по параметру для решения нелинейных САУ
Способ 2. Остановить процесс вычислений, когда ||∆Х m || < ε доп . ∆Х m = Х m +1 – Xm . Чем ближе к Х*, тем меньше величина ||∆Х m ||.
Выбор способа зависит от характера поведения функций fi (Х) вблизи решения.
 |
fi fi
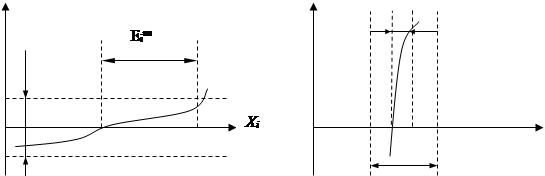
Ei m
εдоп
Хi * Xi m Xi * Xi m Xi
εдоп
Рис. 1.1 Рис. 1.2
Из рис. 1.1 видно, что если заканчивать итерационный процесс по величине || F ||, то при этом можно оказаться довольно далеко от Х i * по Х i m . На рис. 1.2 – наоборот, итерационный процесс заканчивается при малых значениях ||∆Х m ||, что приводит к большим ошибкам по || Fm ||.
Способ 3. Чтобы избежать недостатков первых двух способов, контролируют обе нормы, а итерационный процесс заканчивают при том значении m , при котором
max {||∆Х m ||, || F (Х m )|| }< ε доп
Следует заметить, что при плохой обусловленности матрицы G / Х вблизи Х* возможны колебания значений норм. Тогда нужно применять специальные методы уменьшения этих колебаний.
1.2 Метод дифференцирования по параметру
Здесь алгебраическая задача сводится к задаче интегрирования системы ОДУ, которая формируется следующим образом. Рассмотрим функцию Н(Х, t) как функцию параметра tЄ[0,1], т.е. обозначим Ф(t)=Н(Х, t). Пусть Ф(t) непрерывно дифференцируема по t на интервале [0,1], тогда
Ф/ (t)=( δH/δХ)·X/ (t)+ δH/δt.
Функция H(Х, t) удовлетворяет тем же требованиям, что и в методе продолжения решения по параметру. Следовательно, функция Х(t) удовлетворяет уравнению H(Х, t)=0 , откуда получаем Ф/ (t)=0 . Значит, из последнего соотношения имеем систему ОДУ вида
X/ (t)= - ( δH/δХ)-1 ·δH/δt.
Система ОДУ решается при начальных условиях t=0, X(0)=X0 . Время меняется от 0 до 1. При t=1 получим решение системы F(X)=0 - вектор Х* с точностью, зависящей от точности метода интегрирования системы. Если Н(Х,t)= F(X) + (t - 1) · F(X0 ) , то получим систему ОДУ
X(t)=-J-1 (Х(t))•F(X0 ),
которая является нелинейной по Х .
Данная система решается явными методами Рунге – Кутта, а затем полученное приближенное значение уточняется дискретным методом Ньютона за несколько итераций.
1.3 Явные методы Рунге-Кутта
Свойства методов Рунге-Кутта:
1. Методы являются одношаговыми; чтобы найти X m +1 , нужна информация только о предыдущей точке Xm , t т .
2. Они согласуются с рядом Тейлора вплоть до членов порядка hs , где степень S различна для различных методов и называется порядком метода.
3. Методы не требуют вычисления производных функций fi ( X , t ), i =1, n , а только самой функции в нескольких точкахна шаге hm .
Методом Рунге-Кутта 1-го порядка является явный метод Эйлера:
Х/ =F(Х, t) ;
Xm +1 = Xm + hm · F ( Xm , tm )
Ошибка аппроксимации εα ~ h 2 т . Область абсолютной устойчивости – круг радиусом, равным 1 и центром в точке (0, -1) – см. рис. 1.3, кривая 1; область относительной устойчивости – вся правая полуплоскость.
Рассмотрим методы Рунге-Кутта 2-го и 4-го порядка, которые также используются довольно часто.