Курсовая работа: Исследование неявного метода Эйлера для линейной системы ОДУ с постоянным и переменным шагом
Министерство Образования РФ
НГТУ
Кафедра экономической информатики
Курсовая работа по курсу
«Численные методы в экономике»:
Исследование неявного метода Эйлера для линейной системы
ОДУ с постоянным и переменным шагом
Введение
Целью данного проекта является исследование неявного метода Эйлера для решения линейных систем ОДУ с постоянным и переменным шагом. В ходе работы будет создана программа на языке матрично-ориентированной системы MatLAB и приведена математическая интерпретация метода. Также будет представлено влияние величины шага интегрирования и начальных значений на качество и точность вычислений. Будут проанализированы результаты и сделаны выводы.
1. Постановка задачи. Математическое описание метода
Для линейных систем
( Х = АХ+В U ( t ) )
эта проблема решается очень просто. Нелинейные системы приходится линеаризовать в точке Xm , tm , затем уже решать приведенным ниже способом:
![]()
Все значения в этой формуле, кроме Xm +1 , которое нужно найти, известны (I – единичная матрица). Это получается линейная система, которая решается стандартными методами.
Неявный метод Эйлера: Группа неявных методов Рунге-Кутта используется для интегрирования "жестких" систем. Неявный метод Эйлера (Рунге-Кутта 1-го порядка) описывается с помощью следующей формулы:
Xm +1 = Xm + hm F ( Xm +1 , tm +1 )
Как уже говорилось ранее, чтобы определить Xm +1 надо решить данную систему. При известных значениях величин Xm , hm , tm +1 - это система нелинейных уравнений относительно Xm +1 . Ее необходимо решать на каждом шаге по времени m.
Для линейных систем
( Х = АХ+В U ( t ) )
эта проблема решается очень просто. Нелинейные системы приходится линеаризовать в точке Xm , tm , затем уже решать приведенным ниже способом:
![]()
Все значения в этой формуле, кроме Xm +1 , которое нужно найти, известны (I – единичная матрица). Это получается линейная система, которая решается стандартными методами.
Рассмотрим характеристики метода.
1.Точность. Ошибка аппроксимации по величине равна ошибке аппроксимации явного метода Эйлера, но она противоположна по знаку:
i am = -0.5h2 m X.. (t- )
где hm <= t- <= tm +1
2. Устойчивость метода
Сделав линеаризацию функции F(X,t)в точке Xm , hm , tm + 1 получим уравнение относительно ym +1
Ym+1 = ym +h ym+1
Характеристического уравнение r-hlr-1=0 "дает" корень r=1/(1-hl).
1. Условие абсолютной устойчивости (Re(hl)<0): |1/(1-hl)|<1 или по другому
|1-hl|>1. Последнее неравенство можно преобразовать к виду:
[1-Re(h )]2 + Im((h )]2 >1
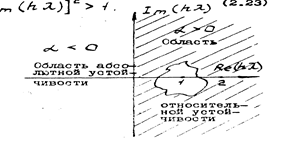
С учетом того, что мы рассматриваем ситуацию, когда Re(hl)<0, область абсолютной устойчивости, как следует из неравенства [1- Re ( h )]2 + Im (( h )]2 >1 - вся левая полуплоскость.
2. Условия относительной устойчивости
(Re(hl)>0): |1/(1-hl)|>1.
С учетом ограничения на скорость изменения приближенного решения относительного точного:
|1/(1- h l )|<| eh l |
Из этого соотношения следует, что при |hl|®1 левая часть стремится к бесконечности. Это значит, что в правой полуплоскости имеется некоторая область, где неравенство
|1/(1- h l )|<| eh l | не выполняется.
3. Выбор шага
4. Условия выбора шага диктуются требованиями абсолютной или относительной устойчивости. Однако область абсолютной устойчивости – вся левая полуплоскость. Поэтому шаг с этой точки зрения может быть любым.
Условия устойчивости жестче, так как есть область, где они могут быть нарушены. Можно показать, что эти условия будут выполнены, если в процессе решения задачи контролировать ea m i , а шаг корректировать. Таким образом, шаг можно выбирать только из условий точности, при этом условия устойчивости будут соблюдены автоматически. Сначала задается допустимая погрешность аппроксимации:
e a gon i <=0.001| Xi | max, i=1,n
Процедура выбора шага в процессе численного интегрирования состоит в следующем:
1. Решая систему
Xm +1 = Xm + hm F ( Xm +1 , tm +1
--> ЧИТАТЬ ПОЛНОСТЬЮ <--