Курсовая работа: Микропроцессорный контроллер электропривода постоянного тока
Широкое внедрение в промышленность роботов и гибких производств потребовало существенного расширения и повышения эффективности системы подготовки и переподготовки специалистов в этой области. Создание систем управления роботами и гибкими автоматизированными производствами базируется на средствах вычислительной техники, в первую очередь на больших интегральных схемах и микропроцессорных вычислительных машинах микроЭВМ. По этому одним из направлений подготовки специалистов по системам управления роботами является изучение принципов работы и методов проектирования устройств управления, построенных на базе выпускаемых промышленностью микропроцессорных наборов и микро ЭВМ.
Успехи в области микроэлектроники открывают новые возможности для автоматизации производственных процессов, машин, оборудования и приборов на базе микропроцессоров (МП). Микропроцессоры представляют собой устройства обработки цифровой информации, конструктивно выполненные в виде больших интегральных схем (БИС).
В основу курсового проекта положено проектирование систем на базе одной серии БИС - БИС КР580. Этот выбор обусловлен следующими причинами:
1. Микропроцессорный комплект БИС КР580 является комплектом общего назначения и используется в управляющей, информационной, измерительной, связной, медицинской, бытовой и другой аппаратуре самого различного применения.
2. Комплект БИС серии КР580 представляет собой один из первых отечественных микропроцессорных комплектов. К настоящему времени уже накоплен достаточный опыт построения аппаратурынаего основе. Объем производства МП и микроЭВМ постоянно возрастает, улучшаются их технические характеристики и снижается стоимость. Благодаря реализованной в них возможности программного управления они обладают свойствами универсальных устройств цифрового управления. Это способствует массовому применению МП и микроЭВМ в народном хозяйстве для цифровой обработки данных и управления различными объектами и процессами.
1. Цель и задачи выполнения курсовой работы
Курсовая работа выполняется с целью закрепления знаний по курсу «Общая электротехника и электроника» и развития навыков самостоятельной работы студентов при разработке технического задания, проектировании и эксплуатации отдельных узлов микропроцессорных систем ЧПУ и обработки данных. Задачами выполнения курсовой работы являются:
- получение навыков разработки схемотехнических вопросов микро процессорной техники;
- проработка ряда вопросов, связанных с прикладным программным обеспечением микропроцессорных систем;
- приобретение практических навыков составления и расчета принципиальных электрических схем цифровой и аналоговой техники.
2. Принцип работы ЭП ПТ и общие требования к функционированию контроллера
Электродвигатели (ЭД) постоянного тока нашли широкое применение в приводах главного движения и приводах подач металлорежущих станков и промышленных роботов. Причина - простой способ регулирования частоты вращения вала электродвигателя путем изменения величины управляющего постоянного напряжения. Чем больше управляющее напряжение, тем выше частота вращения. Причем изменение полярности управляющего напряжения приводит к изменению направления вращения вала электродвигателя.
В комплект ЭП ПТ входит тахогенератор ТГ, который закреплен на валу ЭД. Выходное напряжение ТГ, которое пропорционально частоте вращения вала ЭД, используется для ее контроля.
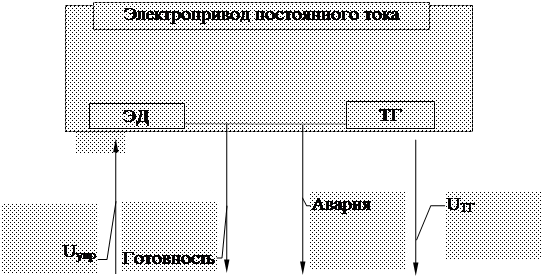
Для управления ЭП ПТ применяются МП контроллеры, которые должны в зависимости от требуемой частоты вращения задавать управляющее напряжение Uупр и контролировать фактическую ее величину по уровню постоянного напряжения, снимаемого с тахогенератора Uтг (рис. 1).
 |
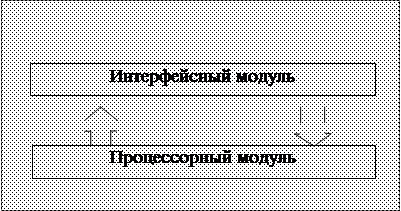 | ||
Рис. 1 Структура электропривода постоянного тока с микропроцессорным управлением
В состав МП контроллера входят два модуля: процессорный и интерфейсный. Процессорный модуль осуществляет отработку управляющих про грамм для реализации алгоритма управления ЭП ПТ. Интерфейсный модуль обеспечивает связь процессорного модуля с электроприводом: преобразование цифровых сигналов в аналоговые и наоборот, промежуточное хранение данных и фиксацию управляющих сигналов.
Проектируемый МП контроллер обеспечивает следующий алгоритм работы ЭП ПТ.
Перед пуском ЭД, т.е. перед подачей Uупр , МП контроллер проверяет наличие сигнала "Готовность", поступающего с электропривода (наличие пи тающего напряжения, снятие различных блокировок и т.д.). При отсутствии данного сигнала МП контроллер не производит пуск ЭД и выдает сигнал "Сбой" на световой индикатор. Если сигнал "Готовность" присутствует, то процессорный модуль МП контроллера выдает в интерфейсный модуль цифровой эквивалент Uупр , который цифро-аналоговым преобразователем преобразуется в аналоговую величину.
После подачи Uупр на электродвигатель МП контроллер осуществляет программным способом определенную по времени задержку, необходимую для разгона ЭД до заданной частоты вращения, а затем вводит цифровой эквивалент напряжения ТГ. Преобразование аналоговой величины UТГ в цифровую осуществляется в интерфейсном модуле аналого-цифровым преобразователем.
После ввода UТГ МП контроллер приступает к сравниванию ее величины с yровнем Uупр . Если уровень UТГ соответствует Uупр , то пуск произошел в нормальном режиме.
Если соответствия нет, то имеет место нештатная ситуация, например, перегрузка ЭД. В этом случае МП контроллер выдает нулевой уровень Uупр (останов ЭД) и сигнал "Сбой", который индицируется светодиодом в интерфейсном модуле.
При пуске ЭД могут возникнуть различные аварийные ситуации. При наличии сигнала "Авария" МП контроллер должен прервать подпрограмму пуска, остановить ЭД и выдать сигнал "Сбой".
3. Проектирование блока центрального процессора
Структурная схема блока ЦП представлена на рис. 2. В его состав кроме ЦП и системного генератора СГ ( на рис. не показан) входят:
- однонаправленный буфер шины адреса БШA;
- системный контроллер СК, объединяющий двунаправленный буфер шины данных, регистр словосостояния и логическую схему формирования шины управления.
Включение БША должно быть таким, чтобы все 16 разрядов ША передавались с его входа на выход.
Так как ШД двунаправленная, то направлением передачи информации через СК необходимо управлять. Это осуществляет сигнал "Прием" (ПМ). При уровне лог. 1 сигналы с ШД через СК должны передаваться в ЦП, а при лог. 0 - из ЦП в ШД.
В начале каждого машинного цикла микропроцессора на ШД выдается восьмиразрядное словосостояние ЦП, отдельные разряды которого используются для формирования сигналов ШУ. Словосостояние ЦП определяет действия, выполняемые микропроцессором в данном машинном цикле (чтение/запись ЗУ, чтение/запись внешних устройств (ВУ) и т.д). Словосостояние фиксируется в СК по сигналу "Строб со стояния" (СС) от системного генератора и хранится в нем до окончания машинного цикла.
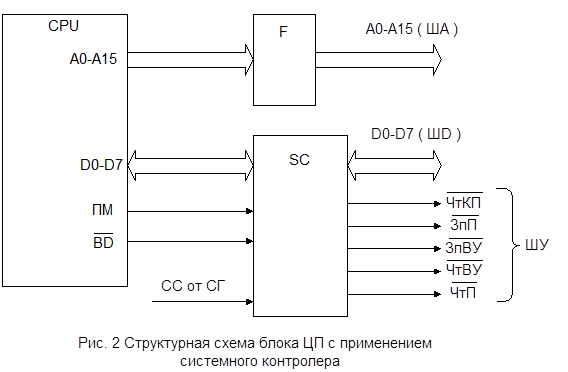
СК также служит для формирования следующих управляющих сигналов ШУ:
- ![]() - чтение контроллера прерывания;
- чтение контроллера прерывания;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--