Курсовая работа: Микропроцессорный контроллер электропривода постоянного тока
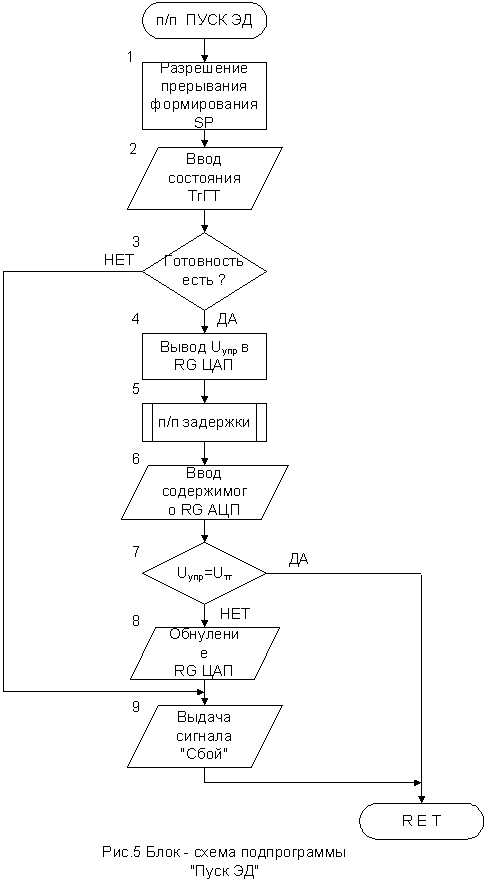
В блоке 3 производится анализ состояния того разряда ШД , к которому подключен триггер ГT.
В регистр ЦАП выводится цифровой эквивалент управляющего напряжения. Поэтому перед программированием этой операции необходимо вычислить по заданному Uупр его цифровой аналог (см. ниже ) .
Задержка времени для разгона ЭД может быть реализована в виде подпрограммы или без нее. Предварительно необходимо по заданному времени задержки произвести соответствующие вычисления (см. ниже).
В блоках 6 и 7 производится ввод цифрового эквивалента напряжения тахогенератора и его сравнение с цифровым эквивалентом управляющего напряжения. При несоответствии производится вывод
в RG ЦАП кода 00 ( блок 8 ), а в триггер СБ - сигнала "Сбой". Вывод в триггер необходимо организовать таким образом; чтобы разряд ШД, к которому подключен триггер, при вводе принял состояние, при котором светодиод должен излучать. Передача лог. 1 или 0 по этому разряду определяется схемой подключения светодиода к триггеру.
6.2 Разработка подпрограммы обслуживания прерывания
Подпрограмма начинает работу при поступлении сигнала "Авария" на вход микропроцессора " Запрос прерывания " (ЗПР). В состав подпрограммы входят три блока, выполняющиеся последовательно друг за другом.
Первый блок осуществляет запрет прерывания и запись в стек содержимого регистров МП.
Второй блок обнуляет регистр ЦАП и выдает сигнал "Сбой".
Третий блок осуществляет вызов из стека содержимого регистров МП, разрешение прерывания и переход на конец подпрограммы пуска.
6.3 Расчет цифрового эквивалента
Расчет сводится к преобразованию заданного управляющего напряжения из десятичной формы в шестнадцатеричную. Причем старший разряд кодирует направление вращения:
0 - прямое вращение, 1 - обратное.
Задано Uупр = -1,28 В. Так как в ЦАП цифровой код преобразуется в аналоговую величину с определенной дискретностью ( 0.05 В ), то первоначально вычисляется количество дискрет для представления аналоговой величины заданного уровня. Для уровня -1,28 В количество дискрет составляет 2610 , а двоичный эквивалент 110012 . С учетом направления вращения получим 1110012 , в шестнадцатеричной форме 1916 .
6.4 Разработка подпрограммы задержки
Подпрограмма задержки реализуется путем организации циклического процесса из N циклов. Если известно время выполнения i-той команды ti , в цикле и количество таких команд K в цикле, то время задержки составит:
Период выполнения одной команды равен:
T = 1 / 2,5*106 = 0,4*10-6 c.
1ком. = 25 такт.
Время выполнения одной команды равно:
tодн.ком. = T * 25 = 0,4*10-6 * 25 = 10-5 c.
Количество команд в цикле равно:
Kком. = tзад. / tодн.ком. = 0,87 / 10-5 = 87000
В шестнадцатеричном представлении N = 1 53D816 или 3216 *1416 *4416
6.5 Распределение памяти
Структура памяти МП контроллера оформляется в виде, представленном на рис. 10
В начальных адресах ( 00 00 - 00 3F ) располагаются восемь областей, закрепленных за конкретным вектором прерывания. За четвертым вектором закреплены 8 байтов с адресами 00 20 - 00 27. Поскольку подпрограмма обслуживания прерывания занимает больший объем памяти, чем отведенный под вектор прерывания, то в этих областях размещают только команду безусловного перехода по адресу, с которого размещена подпрограмма обслуживания прерывания. Стек - это любая область ОЗУ. Однако его целесообразнее располагать начиная с конечной ячейки, т. к. его заполнение происходит в сторону младших адресов. Подпрограммы пуска и обслуживания прерывания располагаются в тех местах памяти , в каких разработчик считает целесообразным в зависимости от объемов ОЗУ и ПЗУ.
00 00 00 1F | ОЗУ | |
00 20 00 27 | Команда перехода по адресу 02 31 | |
00 28 00 3F | ||
| 01 FF | Стек | |
02 00 02 30 | Подпрограмма пуска ЭД | ПЗУ |
02 31 02 42 | Подпрограмма обслуживания прерывания | |
02 43 0B FF | Резерв |
Рис. 6 Распределение памяти
7. Расчет источника питания
Источник питания рассчитывается только по каналу +5В, так как именно по этому каналу питания МП контроллер потребляет основную мощность.
Первоначально определяется суммарная потребляемая мощность всеми применяемыми микросхемами данного контроллера. Исходя из потребляемой мощности, определяется ток нагрузки ![]() при заданном напряжении
при заданном напряжении ![]() .
.
![]() ;
;