Курсовая работа: Моделирование интегрирующего гироскопа
Министерство образования РФ
Саратовский государственный технический университет
Кафедра "Приборостроение"
Курсовая работа
по курсу
"Системы автоматизированного проектирования и конструирования"
на тему "Моделирование свойств интегрирующего гироскопа"
Выполнил: Поляков А.А.
студент гр. ПБС-41
Проверил: Здражевский Р.А.
Саратов 2003
Содержание
Постановка задачи
Назначение и принцип действия ИГ
Уравнения движения ИГ
Математическое моделирование переходных процессов
Список литературы
Постановка задачи
Цель данной работы - математическое моделирование (с применением ЭВМ) свойств интегрирующего гироскопа (ИГ), а также краткое теоретическое описание его устройства, назначения, принципа действия и особенностей конструкции с приведением уравнений движения.
Под моделированием здесь понимается построение графиков переходных процессов и логарифмических частотных характеристик.
Кроме того, была поставлена задача моделирования не просто отдельного прибора, а системы из трех связанных ИГ, перекрестные связи между которыми были учтены при формировании входных сигналов соответствующих гироскопов.
Назначение и принцип действия ИГ
Интегрирующий гироскоп предназначен для измерения малых углов поворота основания и применяется в качестве чувствительного элемента индикаторно-силового гиростабилизатора, а также в системах стабилизации и управления летательными аппаратами.
Интегрирующий гироскоп представляет собой двухстепенный гироскоп с демпфирующим устройством, которое создает момент сил вязкого трения вокруг оси гироузла.
Демпфирующие устройства бывают пневматическими, жидкостными и электрическими.
Последние реализуются в виде системы с обратной связью, состоящей из датчика угла, усилителя, дифференцирующего звена, датчика момента (рис.1).
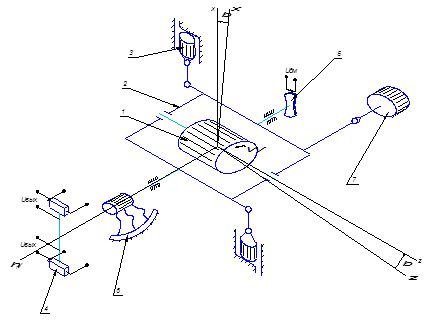
Рис.1. Принципиальная кинематическая схема интегрирующего гироскопа.
1 - гиромотор;
2 - рама;
3 - пневматический демпфер;
4 - потенциометрический датчик угла;
5 - датчик момента;
6 - токоподводящее устройство;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--