Курсовая работа: Привод к лебедке
dп = 45 мм, D= 85 мм, Т = 21 мм, е =0,41; Y= 1,45; Сr= 42,7 кН, Сrо = 33,4 кН.
Смещение точки приложения опорных реакций определяем по формуле (110)
а = 0,5 × (21 + (45 + 85) × 0,41/3) = 19,38 мм,
Для вала ведущей звездочки выбираем роликоподшипник конический однорядный № 7310
dп = 50 мм, D= 90 мм, Т = 22 мм, е = 0,37; Y= 1,60; Сr= 52,9 кН, Сrо = 40,6 кН.
Смещение точки приложения опорных реакций определяем по формуле (110)
а = 0,5 × (22 + (50 + 90) × 0,37/3) = 19,63 мм,
9. Выбор муфты
Для соединения выходных концов вала электродвигателя и быстроходного вала редуктора, установленных на общей раме выберем:
Втулочно-пальцевую муфту 31,5-15 - I.I. - 18-II.2-У3 ГОСТ 21424-75, Δr= 0,2.
Радиальная жесткость упругой втулочно-пальцевой муфты СΔ r = 2140 Н.
Радиальная сила, Fм, кН вызванная радиальным смещением определенным по соотношению
Fм = СΔ r × Δr, (111)
Fм = 2140×0,2 = 0,428 кН
10. Определение реакций в опорах подшипников валов
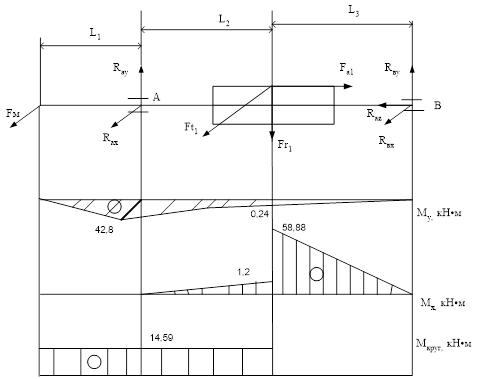
Определение опорных реакций и построение эпюр изгибающих моментов и поперечных сил.
Быстроходный вал. Исходные данные: Ft1 = 0,521 кН; Fr1 = 0,75 кН; Fа1 = 2,06 кН; Fм = 0,428 кН; КН L1 =100 мм; L2 = 80, мм; L3 = 80 мм; d1 = 56 мм.
∑Fx = 0; Rа x + Rв x + Ft1 + Fм = 0, (112)
∑Fy = 0; Rа y + Rв y - Fr1 = 0, (113)
∑Fz = 0; Fа1 - Rа z = 0,∑Mд x = 0; Rа y × (L2 + L3 ) - Fr1 ×L3 + Fа1 ×d1 /2 = 0, (114)
∑Mд y = 0; - Rа x × (L2 + L3 ) - Ft 1 ×L3 - Fм × (L2 + L3 + L1 ) = 0, (115)
Из уравнения (114)
Rа y = (Fr1 ×L3 - Fа1 ×d1 /2) / (L2 + L3 ) = (0,75 × 80 - 2,06 × 56/2) /160 = 0,015 кН
Из уравнения (115)
Rах = ( - Ft 1 ×L3 - Fм × (L2 + L3 + L1 )) / (L2 + L3 )
Rах = (-0,521 × 80 - 0,428 × 260) /160 = - 0,96 кН
Тогда
Rв x = - Rа x - Ft1 - Fм = 0,96 - 0,521 - 0,428 = 0,011 кН.
Rв y = Fr1 - Rа y = 0,75 - 0,015 = 0,735 кН.
M1 x = Rау ×L2 = 0,015 × 80 = 1,2 Нм;