Курсовая работа: Проект автоматизированного электропривода грузового лифта
ДТ – датчики тока;
М – асинхронный электродвигатель;
ИП – источник питания ( конвертор );
ДН – датчик напряжения;
ФИ – формирователь управляющих сигналов транзисторов (драйвер);
МК – микропроцессорный контроллер;
УВВ – устройство ввода / вывода ( внешний интерфейс );
ПУ – пульт управления.
9. СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА И РАСЧЕТ ЕЕ ПАРАМЕТРОВ
9.1 Структурная схема механической части электропривода
Механическая часть электропривода включает в себя движущиеся массы двигателя, передачи и рабочей машины. Структурные схемы механической части должны учитывать упругие связи и распределение моментов инерции между двигателем и рабочей машиной. Многомассовые упругие системы чаще всего сворачиваются в двухмассовые системы с присоединением малых маховых масс к звеньям механической части, обладающими большими маховыми массами, т.е. к ротору двигателя и рабочей машине. Дифференциальные уравнения, описывающие поведение двухмассовой упругой системы, без учёта диссипативных сил и зазоров в передаче, имеют вид:

Сделав необходимые преобразования, получим систему дифференциальных уравнений:

Коэффициенты при производных представляют собой постоянные времени:
– двигателя
– упругого звена
- рабочего органа
Структурная схема двухмассовой упругой системы приведена на рисунке 6.
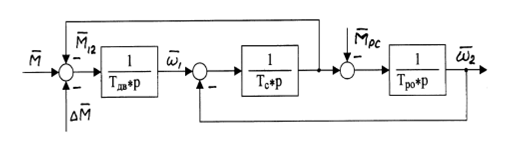
Рисунок 6 - Структурная схема двухмассовой упругой системы
Главные инерционные массы, представленные интегрирующими звеньями с постоянными времени Тдв и Тро, разделены интегрирующим звеном с постоянной времени Тс.
9.2 Структурная схема электромеханического преобразования энергии
Математическое описание асинхронного двигателя при наличии шести обмоток на статоре и роторе с учётом их взаимного расположения, множества связей между ними, блоков произведения и нелинейностей достаточно сложно. В практике электропривода находят применение методы, в которых математическое описание упрощается за счёт различных допущений. Представление двигателя в виде эквивалентной двухфазной машины позволяет несколько упростить математическое описание и структурную схему асинхронного двигателя. Переход к упрощенной структурной схеме на основании записи уравнения момента двигателя М(s) в частных производных по напряжению питания, частоте и скорости оставляет нелинейные коэффициенты усиления. Для рассмотрения переходных процессов на рабочем участке механической характеристики возможно применение более простого соотношения между моментом и скоростью двигателя –формулы Пинчука И.С.
![]()
где β = 2*Мк / (ω0н*Sк) – модуль жесткости линеаризованной механической характеристики.
Передаточная функция электромеханического преобразования энергии в асинхронном двигателе:
![]()
После преобразований структурная схема асинхронного двигателя для рабочего участка механической характеристики полностью повторяет структурную схему двигателя постоянного тока независимого возбуждения (см. рисунок 5).