Курсовая работа: Проект автоматизированного электропривода грузового лифта
Многообразие и сложность выполняемых приводом функций в ЭМС, МС системах обусловливает тесную взаимосвязь трех подсистем преобразования: вещества, энергии, информации. В то же время, среди перечисленных подсистем невозможно выделить главную, и второстепенную, представляющих в совокупности единую автоматизированную систему управления заданным процессом преобразования энергии.
В современных ЭМС, МС преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел — исполнительными механизмами (ИМ). Механизмы входят в состав машин различных технических систем и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых воздействий, формируемых приводами ЭМС, МС и необходимых для качественного выполнения заданных рабочих (технологических) процессов при функционировании ТС.
Создание нового образца МС обычно сопровождается использованием в разнообразных вариантах гибких технологических решений. Разновидностью этого принципа является модульный подход. Модули могут легко соединяться, образуя сложные технические системы, разъединяться, заменяться с целью формирования ТС с другими компонентами и техническими характеристиками при необходимости модернизации, ремонта. В общем случае модуль характеризуется конструктивной и технологической завершенностью, обладает строго фиксированными параметрами (функциональными характеристиками, геометрическими размерами), принадлежащими заранее установленным параметрическим типоразмерным рядам.
2. ОПИСАНИЕ РАБОЧЕЙ МАШИНЫ И ЕЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1 Исходные данные для проектирования электропривода цепного транспортера
Объектом для проектирования электропривода является механизм с повторно-ратковременным режимом работы ( механизм подъема экскаватора, крана, механизм передвижения тележки или моста крана, механизм поворота экскаватора и т.п.). Нагрузка механизма изменяется в течение цикла, включает в себя разгон до рабочей скорости, выполнение работы на этой скорости, торможение или реверс и возвращение на повышенной скорости в исходное положение. В процессе работы механизма возникает необходимость регулирования скорости и момента, ограничения предельных значений момента, ограничения ускорения рабочего органа. Возникают режимы наброса и сброса нагрузки.
Исходными данными для проектирования электропривода являются:
– кинематическая схема рабочего органа с указанием вращающихся и поступательно движущихся динамических масс и усилий (моментов) сопротивления движению;
– скорости движения рабочего органа при различной загрузке с допускаемыми отклонениями от заданного значения;
– допускаемые значения ускорения рабочего органа по условиям механической прочности или условиям технологического процесса;
– время работы для выполнения технологической операции и число циклов в час;
– линейное перемещение (или угол поворота вала) РО;
– линейные (или предельные) жесткости соединительных валов РО;
– система электроснабжения участка (цеха), в котором работает механизм;
– условия окружающей среды (задымленность, вентиляция, влага и т.п.).
Грузовой лифт предназначен для подъёма груза с нижней площадки на верхнюю. Вниз клеть может спускаться как без груза, так и с грузом. Цикл работы лифта включает в себя времена подъёма и опускания клети, а также времена загрузки и выгрузки. Подъём клети происходит с установившейся скоростью Vр, а опускание – со скоростью Vв > Vр.
В процессе расчета необходимо определить наиболее загруженный для двигателя режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск.
Кинематическая схема электропривода приведена на рисунке 1.
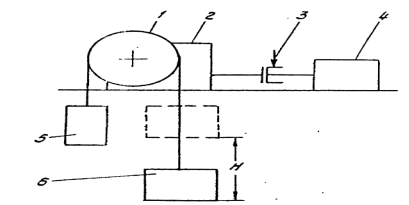
Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес.
Технические данные транспортера (вариант 31) приведена таблице 1.
Таблица 1
| Параметр | Обозначение | Значение |
| Грузоподъемность, кг | mг | 5 |
| Масса клети, кг | mк | 6 |
| Масса противовеса, кг | mп | 9,5 |
| Диаметр канатоведущего шкива, м | D | 0,4 |
| Линейная жесткость, МН/м | Сл | 105 |
| Высота подъема клети, м | h | 8 |
| Скорость подъема клети, м/с | Vр | 0,25 |
| Скорость опускания, м/с | Vв | 0,35 |
| Допустимое ускорение, м/с² | а | 0,5 |
| Число циклов в час | z | 30 |
| Суммарное время работы, не более, с | tр | 85 |
3. РАСЧЕТ МОМЕНТОВ СТАТИЧЕСКИХ СОПРОТИВЛЕНИЙ И ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Расчет моментов при движении с грузом:
Масса всех движущихся частей: ![]()
Равновесная масса: ![]()
– момент сил трения в подшипниках

– момент трения качения
![]()
Статический момент рабочей машины равен:
![]()