Курсовая работа: Проектирование и исследование механизмов поршневого насоса
2.2 Структурный анализ механизма
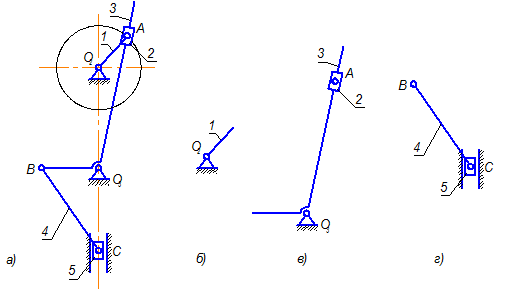
Рис. 3
Количество подвижных звеньев механизма, изображенного на рис. 3а, равно n = 5. Звенья соединяются между собой при помощи пяти вращательных пар (0-1, 1-2, 0-3, 3-4, 4-5) и двух поступательных пар (2-3 и 5-0). Все пары являются парами V класса. Степень подвижности механизма вычисляем по формуле Чебышева
W = 3n – 2p5 – p4 = 3∙5 – 2∙7 = 1.
Ведущее звено – кривошип О2 А (рис. 3б). Ведомая часть состоит из двух двухповодковых групп Ассура: звенья 2 и 3 образуют группу II класса, 2-го порядка, 3-го вида (рис. 3в), а звенья 4 и 5 группу II класса, 2-го порядка, 2-го вида (рис. 3г).
Формула построения механизма может быть записана в следующем виде:
![]()
2.3 Кинематическое исследование механизма
Выбираем масштаб μℓ = 0,00125 ![]() и вычерчиваем кинематические схемы механизма в 12-ти положениях. Для всех положений механизма строим планы скоростей и ускорений. Масштаб планов скоростей выбираем μv = 0,01
и вычерчиваем кинематические схемы механизма в 12-ти положениях. Для всех положений механизма строим планы скоростей и ускорений. Масштаб планов скоростей выбираем μv = 0,01 ![]() , планов ускорений – μа = 0,05
, планов ускорений – μа = 0,05 ![]() . Рассмотрим построение плана скоростей на примере 1-го положения механизма (рис 4а).
. Рассмотрим построение плана скоростей на примере 1-го положения механизма (рис 4а).
Рассчитываем скорость точки А1 кривошипа О2 А

![]()
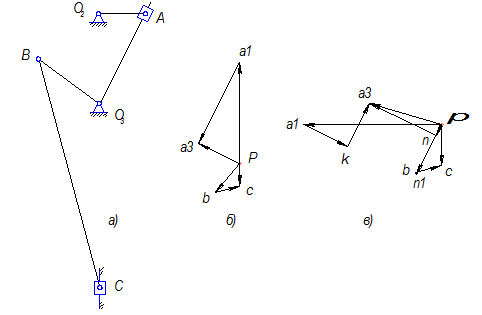
Рис. 4
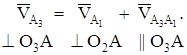
Из произвольно выбранной точки Р (рис. 4б), принимаемой за полюс, откладываем отрезок 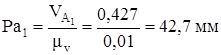 перпендикулярно О2 А, изображающий скорость точки А1 кривошипа. Скорость точки А3 можно рассматривать как геометрическую сумму переносной вращательной скорости точки А1 кривошипа и относительной поступательной скорости точки вдоль кулисы:
перпендикулярно О2 А, изображающий скорость точки А1 кривошипа. Скорость точки А3 можно рассматривать как геометрическую сумму переносной вращательной скорости точки А1 кривошипа и относительной поступательной скорости точки вдоль кулисы:
Из точки а1 плана скоростей проводим прямую параллельно О3 А, а из полюса Р – прямую, перпендикулярную О3 А, и в точке их пересечения ставим букву а3 . Отрезок Ра3 изображает в масштабе μv скорость точки А3 кулисы, а отрезок а1 а3 – относительную скорость точки А, вдоль кулисы
![]()
![]()
Отрезок Pb на плане скоростей, соответствующий скорости точки В, находится из пропорции
 или
или 
и проводится так, что ![]() .
.
Скорость точки С определяется построением геометрического равенства
Отрезок Рс изображает в масштабе μv скорость точки С поршня, а отрезок bc – относительную скорость точки С, вокруг точки В
![]()
![]()
Построим для того же положения механизма план ускорений (рис. 4в).