Курсовая работа: Проектирование системы автоматического управления для технологического процесса сборки радиоэлектронных
Усилитель служит для согласования выходного сигнала с входным сопротивлением обмотки управления ЭМУ. Его можно считать безинерционным звеном с передаточной функцией(2.10):
![]() (2.10)
(2.10)
т. к. в расчетах принимаем Ку =1.
2.4 Фазовый детектор
Фазовый детектор (фазочувствительный выпрямитель) служит для преобразования сигнала переменного тока в сигнал постоянного тока с учетом фазы.
Передаточная функция фазового детектора(2.11):
| (2.11) |
где Кфд - коэффициент усиления фазового детектора.
В расчетах принимают Кфд =1.
2.5 Измерительный прибор
Измерительный прибор (сельсина пара) измеряет разницу (рассогласование) между значениями входной и выходной величины. Его задачей является генерация управляющего сигнала, пропорционально рассогласованию.
Передаточная функция измерительного прибора(2.12):
| (2.12) |
где Квп - коэффициент усиления измерительного прибора.
В расчетах принимают Квп =1.
2.6 Редуктор
Передаточная функция редуктора(2.13):
| (2.13) | |
=На рисунке 2.1 представлена структурная схема системы слежения для автоматического управления, которою мы рассматриваем.

Рисунок 2.1 – Структурная схема не скорректированной системы слежения.
| (2.14) |
Общая передаточная функция примет вид:
| (2.15) |
3. РАСЧЕТ ПОСЛЕДОВАТЕЛЬНОГО НЕПРЕРЫВНОГО КОРЕКТИРУЮЩЕГО ЗВЕНА МЕТОДОМ ЛОГАРИФМИЧЕСКОЙ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ
3.1 Проверка заданной системы слежения
Для того, чтобы проверить действительно ли данную систему необходимо корректировать, проведем моделирование переходного процесса с помощью пакета прикладных программ SIAM.
По полученной переходной характеристике определим прямые показатели качества:![]() время регулирования, равное
время регулирования, равное ![]() перерегулирование системы
перерегулирование системы ![]()
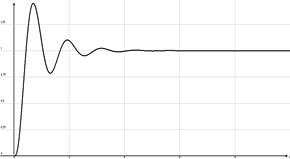
Рисунок 3.1 – Переходной процесс заданной системы
По данным графикам и показателям определили, что заданную систему необходимо корректировать.
3.2 Построение ЛАЧХ заданной (нескорректированной) системы
Передаточная функция разомкнутой системы имеет следующий вид:
![]()
Сопрягающие частоты определяют по формуле:
![]() (3.1)
(3.1)