Курсовая работа: Проектирование системы автоматического управления для технологического процесса сборки радиоэлектронных
![]()
![]()
Сопрягающие частоты откладываются по оси абсцисс в логарифмическом масштабе. Откладывается точка А1 с координатами
![]() и
и ![]() .
.
![]()
От этой точки в область низких частот проводится прямая линия с наклоном ![]() дБ/дек.
дБ/дек.
![]() дБ/дек =
дБ/дек = ![]() дБ/дек = -20 дБ/дек
дБ/дек = -20 дБ/дек
От этой же точки до следующей сопрягающей частоты проводится прямая линия под наклоном -20 дБ/дек относительно предыдущей линии, т.е. под наклоном -40 дБ/дек. От точки пересечения данной прямой с сопрягающей частотой проводится линия до следующей сопрягающей частоты под наклоном -20 дБ/дек относительно предыдущей (-60 дБ/дек). Таким образом строятся линии до последней сопрягающей частоты, а от нее проводится прямая, стремящаяся в бесконечность, под наклоном -80дБ/дек (рис. 3.2, а-а-а…).
3.3 Построение желаемой ЛАЧХ
Построение желаемой ЛАЧХ удобно начинать с области средних частот в такой последовательности. С помощью заданных величин ![]() и таблицы[1, табл.5.1, стр.13] определяем частоту среза
и таблицы[1, табл.5.1, стр.13] определяем частоту среза ![]() (3.2). Для
(3.2). Для ![]() определяем
определяем ![]() , получаем:
, получаем:
 (3.2),
(3.2),![]()
Наносим на ось абсцисс частоту ![]() и проводим через нее прямую линию с наклоном -20 дБ/дек. Частота, которая ограничивает область средних частот желаемой ЛАЧХ слева, определяется величиной отрезка
и проводим через нее прямую линию с наклоном -20 дБ/дек. Частота, которая ограничивает область средних частот желаемой ЛАЧХ слева, определяется величиной отрезка ![]() [1, табл.5.1, стр.13]. Частота, ограничивающая область средних частот справа, определяется величиной отрезка
[1, табл.5.1, стр.13]. Частота, ограничивающая область средних частот справа, определяется величиной отрезка ![]() , при этом
, при этом ![]() .
.
В области высоких частот желаемую ЛАЧХ строим в виде прямолинейного отрезка с наклоном -80 дБ/дек (параллельно заданной ЛАЧХ). По заданной величине коэффициента усиления системы (3.3), определяем величину ![]() и отмечаем на чертеже точку А2 проводим прямую линию с наклоном -20 дБ/дек.
и отмечаем на чертеже точку А2 проводим прямую линию с наклоном -20 дБ/дек.
![]() . (3.3)
. (3.3)
От точки М, ограничивающая область средних частот слева, проводим прямую линию с наклоном -40 дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ(рис. 3.2, б-б-б…).
3.4 Построение запрещенной области
Поскольку в задании на разработку следящей системы указана максимальная допустимая ошибка слежения Хmax , при условии, что входной сигнал может изменяться с максимальной угловой скоростью ![]() и с максимальным угловым ускорением
и с максимальным угловым ускорением ![]() , то для выполнения этих требований необходимо, чтобы желаемая ЛАЧХ не попадала в запрещенную область, т.к. на низких и высоких частотах нежелательно из-за увеличивается перерегулирование, время регулирования и возможна потеря системой устойчивости. Для построения запрещенной области, найдем координаты ключевой точки (3.4-3.5):
, то для выполнения этих требований необходимо, чтобы желаемая ЛАЧХ не попадала в запрещенную область, т.к. на низких и высоких частотах нежелательно из-за увеличивается перерегулирование, время регулирования и возможна потеря системой устойчивости. Для построения запрещенной области, найдем координаты ключевой точки (3.4-3.5):
![]() (3.4)
(3.4)
![]() (3.5)
(3.5)
После подстановкиполучим координаты запрещенной области:![]() и
и ![]() .
.
От точки В вправо проводим линию с наклоном -40 дБ/дек. Из рисунка 3.2 видно, что запрещенная область лежит так, что она влияет на качество и устойчивость системы, т.к. ЛАЧХ попадает в запрещенную область. Это означает, что при данном коэфициенте Кс заданная точность слежения не может быть обеспечена и необходимо её увеличить, поэтому мы поднимаем желаемую ЛАЧХ так, чтобы она не попадала в запрещённую область.
Запишем передаточную функцию непрерывной желаемой системы(3.6):
 (3.6)
(3.6)
![]()
После построения ЛАЧХ, строим ЛФЧХ желаемой системы (рис.3.2) и определяем запас устойчивости по фазе и амплитуде: ![]()
![]()
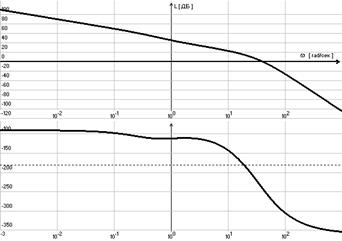
Рисунок 3.2 – ЛАЧХ и ЛФЧХ желаемой системы слежения
3.5 Расчет последовательного корректирующего звена
ЛАЧХ последовательного непрерывного корректирующего звена строится путем отнимания из ЛАЧХ желаемой ЛАЧХ заданной системы