Курсовая работа: Проектирование системы автоматического управления
Погрешность ![]()
![]()
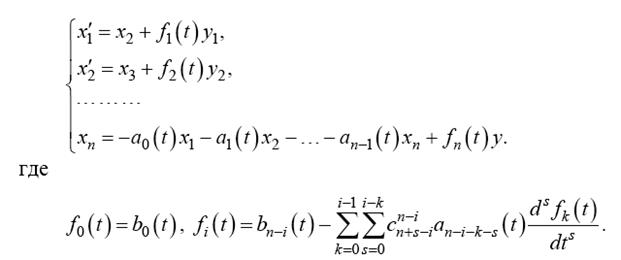
При решении уравнения высокого порядка необходимо перейти к нормальной форме Коши.
![]()
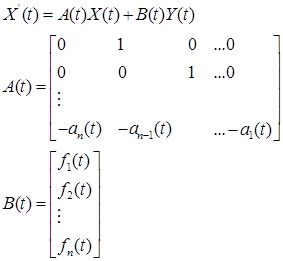
нормальная форма Коши имеет вид
![]()
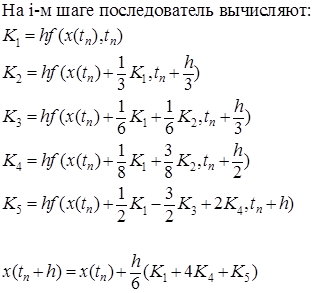
Разгонный метод Рунге – Кутта 5.
Дифференциальное уравнение системы.
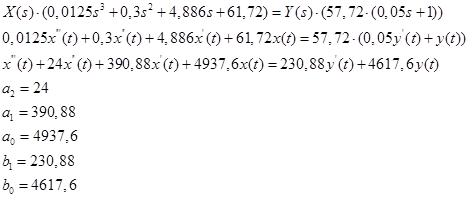
![]()
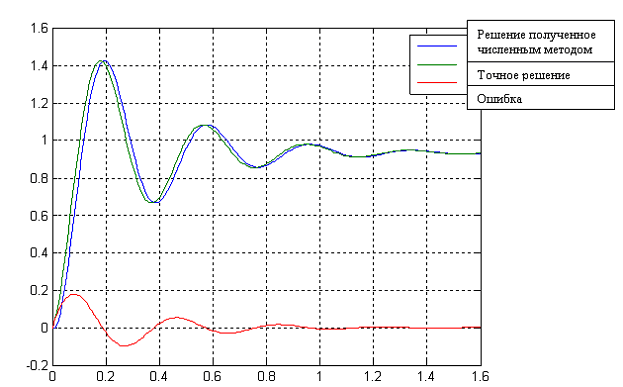
Рис.7. Переходная функция найденная численным методом и точная ![]()
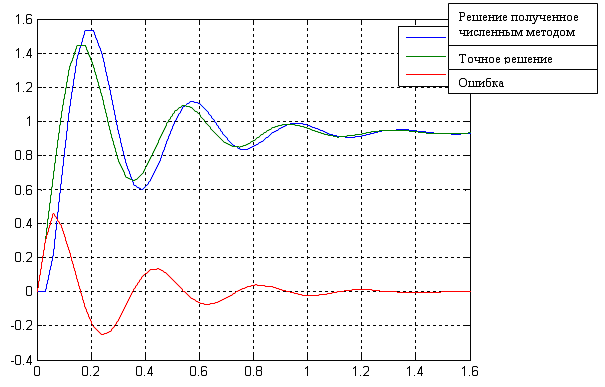
Рис.8. Переходная функция найденная численным методом и точная при ![]()
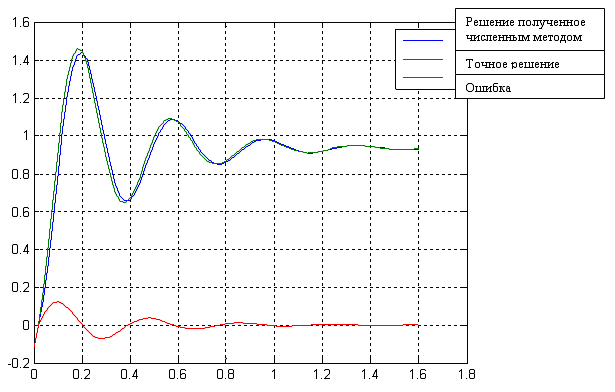
Рис.9. Переходная функция найденная численным методом и точная ![]()
Заключение: из графиков видно, что наибольшая погрешность возникает в самом начале процесса интегрирования.
При ![]() погрешность значительно вырастает.
погрешность значительно вырастает.
1.3 Анализ спектральным методом системы по базису функций Лягерра.
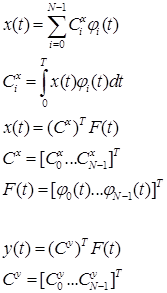
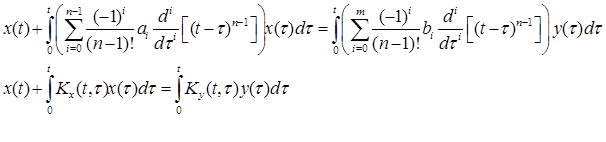
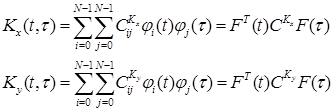
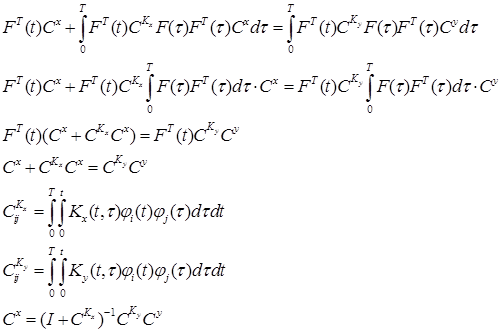
Разложим ядра ![]() интегрального уравнения в ряды Фурье по базису функций Лягерра.
интегрального уравнения в ряды Фурье по базису функций Лягерра.
 функции Лягерра.
функции Лягерра.
Выбираем ![]()