Курсовая работа: Проектирование системы автоматического управления
Дифференциальное уравнение системы.
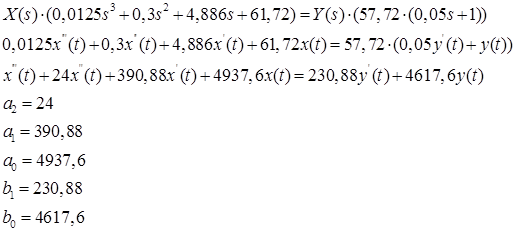
Спектральная характеристика системы определяется по формуле
![]()
![]()
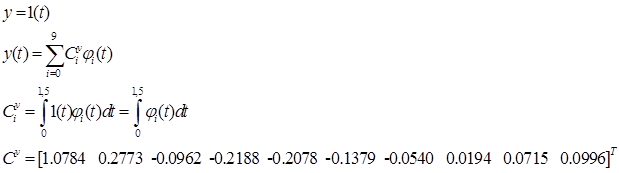
Спектр выходного сигнала системы:
 Спектральная характеристика системы:
Спектральная характеристика системы:


Рис.10. Переходная функция, построенная спектральным методом

Рис.11. Реакция на ![]()
Фазовый сдвиг ![]()
2. Синтез регулятора
Так реальная переходная характеристика системы не удовлетворяет поставленным требованиям ![]() , необходимо произвести коррекцию системы. В качестве корректирующего устройства ПИД –регулятор
, необходимо произвести коррекцию системы. В качестве корректирующего устройства ПИД –регулятор ![]() .
.
Эталонная переходная характеристика ![]()
Необходимо минимизировать следующую целевую функцию.
![]()
Метод оптимизации Дэвидона, Флетчера, Пауэла.
Согласно данному методу минимум ищется в направлении ![]()
![]() - ищется на каждом шаге мини минимизацией
- ищется на каждом шаге мини минимизацией ![]()
![]() - некоторая симметричная положительно определённая матрица, которая при
- некоторая симметричная положительно определённая матрица, которая при ![]() переходит в матрицу Гессе. Обычно при
переходит в матрицу Гессе. Обычно при ![]()
![]()

достоинства этого метода высокая скорость сходимости, простота вычисления ![]()
![]() - будем искать методом золотого сечения.
- будем искать методом золотого сечения.
Параметры регулятора:


Рис.12. Графики переходных характеристик системы
3. Синтез робастного регулятора матричным методом.