Курсовая работа: Проектирование цифровой линии
Рпер ³ 1.15 Вт, Возьмем Рпер = 5 Вт.
2.5 Выбор структурной схемы передатчика
Передаваемые аналоговое сигналы через коммутатор, подаются на АЦП, в котором они преобразуются в цифровой код. Каждому аналоговому сообщению соответствует свое кодовое слово. Все кодовые слова имеют одинаковую разрядность (8). При заданном динамическом диапазоне 10 дБ можно применять восьмиразрядное линейное квантование. С помощью преобразователя кода (регистр) параллельный код преобразуется в последовательный. Все слова от источников сообщений образует кадр. Для определения в приемнике начала кадра в него вводится в синхрослово (выбираем семиразрядный код Баркера). Объединение синхрослова и кодовых слов происходит в сумматоре. Далее сигналы поступают на фазовый манипулятор в котором манипуляция фазы происходит по закону ОФМ. Сформированным фазоманипулированным сигналом осуществляется фазовая модуляция несущего колебания. С помощью системы синхронизации происходит управление работой передающей части радиолинии. Подключение аналоговых сигналов U1 (t),U2 (t) ………U5 (t) к АЦП происходит с периодом, который определяется частотой процессов U,U2……U5 (fв=5 Гц.). Система синхронизации управляет также работой регистра и вырабатывает также работой регистра и вырабатывает запускающий импульс по которому формируется код Баркера, т.е. синхрослово.
2.6 Структурная схема приемника
На выходе фазового детектора высокочастотной части приемника формируется фазоманипулированный сигнал на поднесущей частоте fпод т.е. сигнал с ОФМ. После УПЧ иФД2 формируется последовательность прямоугольных импульсов далее поступающих на устройство сравнения (УС) и элемент памяти (ЭП) которые используются для распознавания кода. Управляет работой схема посимвольной синхронизации, которая вырабатывает периодическую последовательность импульсов (меандр.) тактовой частоты. В данном приемнике используется метод когерентного приема сигналов с ОФМн т.к. некогерентный прием может осуществляться только при скорости передачи не более 200 бод ввиду того, что очень трудно реализовать кинематические фильтры на большие частоты.
Выделенная последовательность импульсов далее поступает на триггер далее на дешифратор кода Баркера после чего на регистр преобразующий последовательный код в параллельный, далее на ЦАП, который преобразует код в выборку соответствующей амплитуды далее на селектор каналов.
Управляет работой ЦАП, СК и дешифратора пересчетная схема, задача которой заключается в разрешении и запрещении работы ЦАП, регистра и СК по приходу кадровой синхронизации (импульс с дешифратора) и пересчет импульсов строчной синхронизации в импульсы канальной.
2.7 Описание функциональной схемы передатчика
В начальный момент времени из триггера на выходе логическая “1”. Тактовые импульсы через схему И3 проходят на формирователь кода Баркера и на счетчик СЧ1. С ФКБ через открытый ключ К2 код Баркера (7-разрядный) проходит на вход схемы формирования команд ОФМ (Т-триггер). В это время счетчик СЧ1 производит подсчет количества тактовых импульсов равного количеству импульсов кода. При окончании седьмого импульса в начале восьмого на выходе СЧ1 формируется импульс переполнения, который через схему И4 обнуляет СЧ1 и переключает триггер в положение логического 0. С этого момента К2 переключается на второй вход, через схемы И1 и И2 импульсы синхронизации поступают на К1 и АЦП, а схем И3 запрещает их поступление на ФКБ. СЧ2 нужен для подсчета количества тактовых импульсов равного количеству импульсов кода и на 41 импульсе выдает импульс переполнения, который переводит триггер в положение “1”, которая обнуляет СЧ2 и весь цикл формирования кадра повторяется снова.
Т - триггер формирует из потока “0” и “1” поток по закону если “0” то на выходе триггера скачок если 1 то сигнала нет. Далее происходит манипуляция фазы по полученному закону.
2.8 Описание функциональной схемы приемника.
После каскадов ВЧ и ФД1 и УПЧ мы получаем сигнал КИМ-ОФМ, который поступает на ФД2 УФОН которого построен по схеме Пистолькорса. Это наиболее простая схема УФОН приемлемая в данном случае т.к. ОФМ нечувствительна к обратной работе фазового детектора. После ФД2 и УО получаем последовательность прямоугольных импульсов нашего кода обработанного законом ОФМ. Схема 1 представляет собой сравнивающее устройство, а два D-триггера являются элементом памяти. Они включены по схеме ведущий-ведомый тактовая частота подаваемая на триггера равна половине частоты посимвольной синхронизации.
Далее сигнал представляющий наш кадр поступает на оптимальный фильтр кода Баркера, состоящий из линии задержки и сумматора, который при определении кода выдает на выходе импульс 1 длительностью t0 (длительность одного символа) сумматор построен на жесткой логике по принципу nиз к (6 из 7) верхних символов кода.
Импульс с выхода сумматора приходит на схему запуска которая разрешает работу сдвигового регистра и счетчиков СЧ1 и СЧ2. СЧ1 формирует импульсы с частотой fт/8 которые разрешают считывание параллельного кода 1-го из каналов в ЦАП формирующего 1 выборку длительностью t0 за время одного канала. СЧ2 производит подсчет каналов и выводит их номер в двоичном коде, которым управляются коммутаторы КК1 И КК2 старший разряд (А3) СЧ2 используется для выбора коммутатора.0 работает КК1 1 работает КК2. С выходов коммутаторов поступают на фильтры НЧ которые служат для выделения канальных сигналов U1,U2…U5. Такая схема коммутации позволила применить 1 сдвиговый регистр и один ЦАП.
2.9 Схемная разработка системы кадровой синхронизации
В цифровых командных радиолиниях необходимо применять кадровую синхронизацию. В качестве сигналов кадровой синхронизации часто используются составные сигналы, причем выделение этих слов в приемнике осуществляется с помощью пассивного согласованного фильтра. Напряжение на выходе согласованного фильтра воспроизводит автокорреляционную функцию синхронизирующего сигнала. Для уменьшения ошибок, возникающих при обнаружении синхронизирующего сигнала и определении его временного положения, автокорреляционная функция должна иметь узкий центральный пик и малый уровень “боковых” выбросов. Подобным свойством обладают ряд широкополосных сигналов, в том числе сигналы, сформированные на основе некоторых двоичных кодов.
В данной работе выбран синхронизирующий сигнал в виде 7-значного кода Баркера, его нормированная автокорреляционная функция показана на рис.
Функциональная схема устройства декодирования кадрового синхронизирующего сигнала
Принятый сигнал поступает на линию задержки. Расстояние между отдельными отводами этой линии соответствует длительности элементарных импульсов кода. Максимальное время задержки синхронизирующего сигнала равно полной длительности этого сигнала Тз. Сигналы которые снимаются с отводов линии задержки, поступают на сумматор. При этом часть сигналов проходит через инверторы, изменяющие полярность сигналов. Пространственное расположение отводов линии задержки, к которым подключены мнверторы, воспроизводит в обратном порядке временное положение символов "0", имеющих в составе рассматриваемого синхронизирующего колового слова. Тем самым обеспечивается синхронное накопление энергии отдельных импульсов этого слова в сумматоре. К выходу сумматора подключен фильтр, который согласован с одиночным видеоимпульсом длительности.
В момент окончания принятого синхронизирующего кодового слова на выходе согласованного фильтра образуется короткий импульс значительной амплитуды, который соответствует центральному "пику" автокорреляционной функции. С помощью таких импульсов осуществляется запуск пороговой схемы предназначенной для выделения отдельных синхронизирующих сигналов.
3. Контур управления и его анализ
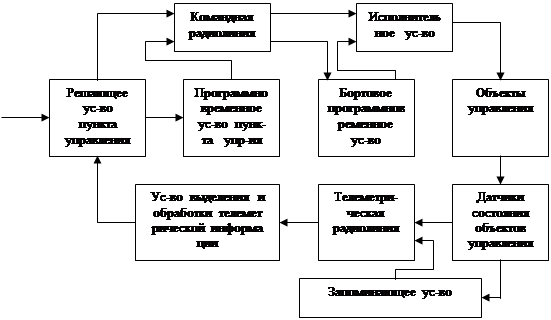
Радиотелемеханической системой называется совокупность устройств, предназначенных для управления состоянием и работой различных приборов и агрегатов.
В комплексах ЛА радиотелемеханические системы используются для управления бортовыми приборами и агрегатами, а также состоянием летательных аппаратов в целом. Такое управление осуществляется подачей на исполнительные устройства приборов и агрегатов (объектов управления) соответствующих команд. Команды формируются на основе контроля (измерения) некоторой в общем случае многомерной величиныg ( t), которая непосредственно или косвенно характеризует либо условия, в которых находился объект управления, либо текущее состояние объекта. Для осуществления такого контроля в состав радиотелемеханических систем включаются либо те или иные радиоизмерительные устройства, либо датчики - преобразователи неэлектрических величин в электрические. Формирование команд осуществляется в решающих устройствах. Которые в простейших случаях представляют собой схемы сравнения и реле, а в более сложных - счетно-решающие приборы и системы обработки результатов измерений. Команда поступает на управляемый объект через исполнительное устройство.
Различают автономные и неавтономные радиотелемеханические системы. В первых команды формируются на борту ЛА, во вторых - на пункте управления и передаются на борт летательного аппарата по командной радиолинии.
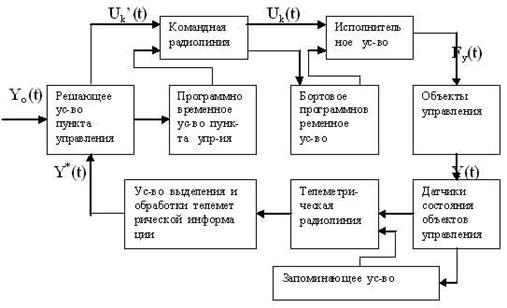
Контур управления неавтономной радиотелемеханической системы с обратной связью:
 |
Uk ’ (t) Uk (t)
Fy (t)
Yo (t)
Y* (t) Y (t)
Информация о состоянии и работе объектов управления - бортовых приборов и агрегатов - получают с помощью датчиков, устанавливаемых на борту ЛА и связанных с контролируемыми величинами g ( t). Полученные с датчиков и соответствующим образом обработанные величины поступают непосредственно или через запоминающее устройство на вход телеметрической радиолинии и передается по ней на пункт управления. На пункте управления в устройстве выделения и обработки телеметрической информации получается оценка состояния объектов управления g* ( t), необходимая для осуществления требуемого управления бортовыми приборами и агрегатами. Формирование команд осуществляется в результате сравнения оценки g* ( t) с величиной gо ( t), задающей необходимое состояние объектов управления. Сформированные команды по командной радиолинии передаются на борт ЛА и поступают на исполнительное устройство, воздействующее на объекты управления. Контур радиотелемеханического управления оказывается замкнутым. В зависимости от решаемых задач, такое управление осуществляется либо как следящее, либо как корректирующее.
4. Разработка функциональной схемы радиолинии
4.1 Некоторые сведения об используемом сигнале
Как уже было отмечено в данной работе разрабатывалась совмещенная радиолиния КИМ-ФМ-ФМ. Интерес к цифрово передаче сообщений с помощью фазовой модуляции вызван в первую очередь тем, что согласно фундаментальным результатам теории потенциальной помехоустойчивости среди двухпозиционных сигналов противоположные сигналы, т.е. сигналы с однократной ФМ, потенциально обладают наибольшей помехоустойчивостью. Но при демодуляции простого фазоманипулированного сигнала возникает сложность в получении синхронного опорного напряжения, имеющего неизменную начальную фазу “явление обратной” работы фазового детектора. Имеется несколько методов и схем построения формирователя опорного колебания. Рассмотрим схему Костаса, обеспечивающую высокую помехозащищенность. В 1956 г. Американский ученый Д. Костас предложил схему формирования опорного напряжения для синхронного (когерентного) детектирования фазоманипулированных сигналов.
Эта схема показана на рисунке:
Влияние манипуляции фазы сигнала устраняется в ней перемножителем, на один вход которого поступает сигнал с выхода усилителя-ограничителя, а на второй - сигнал с выхода фазового детектора (ДФ) системы ФАП. По сравнению с другими схемами формирования такой способ снятия манипуляции обеспечивает более высокую помехоустойчивость схемы с флюктуационными помехами. Недостатком схемы является некоторая ее сложность, обусловленная тем, что перемножитель должен работать на постоянном токе. Это приводит к необходимости пропускания постоянных и очень медленно меняющихся напряжений, вплоть до управителя частоты. При этом входы перемножителя оказываются связанными гальванически и для их взаимной развязки необходимо применять мостовые схемы постоянного тока.
Так же, как и другие схемы, схема Костаса имеет склонность к переходу в режим "обратной работы", так как в ней также возможны два устойчивых значения начальной фазы опорного напряжения, отличающиеся на 1800 .