Курсовая работа: Расчет структурно-алгоритмической схемы системы автоматического регулирования
![]()
![]()
![]()
![]()
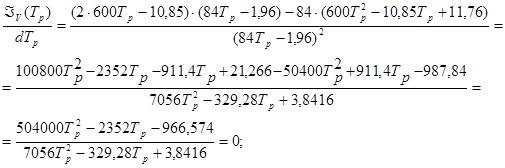
4) Берем производную по ![]() и приравниваем к нулю:
и приравниваем к нулю:
![]()
![]()
![]()
![]()
![]()
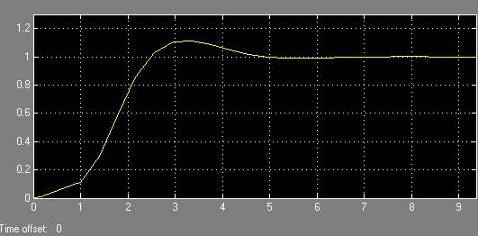
8. Построить переходные характеристики системы по задающему и возмущающему воздействию для значений параметров регулятора выбранных по пп. 5 и 7
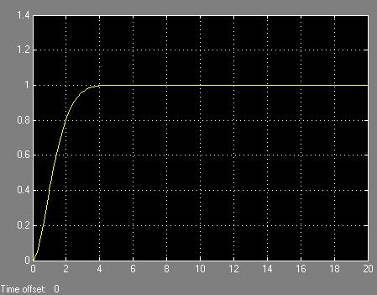
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
Переходная характеристика по возмущающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
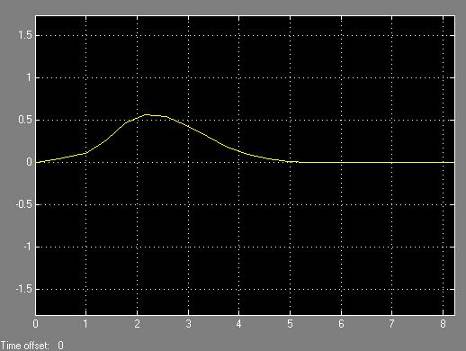
автоматический кривая михайлов найквист регулятор
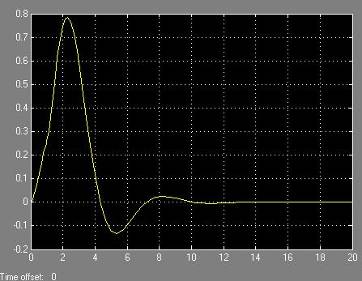
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 7.
Переходная характеристика по возмущающему воздействию для значений параметров регуляторов выбранных из пункта № 7.
9. Определить показатели качества системы
Переходная характеристика по задающему воздействию для значений параметров регуляторов выбранных из пункта № 5.
Время регулирования
Теоретически время достижения выходной координаты до заданного значения равно бесконечности, поэтому вводится допустимая погрешность.
В момент, когда выходная координата попадает в область допустимых значений и больше из нее не выходит, считается окончанием процесса регулирования.
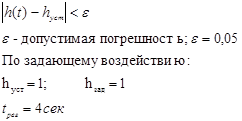
Статическая точность
![]()