Курсовая работа: Расчет тиристорного электропривода
 (5.7)
(5.7)
где ![]() = 10 В — максимальное напряжение управления;
= 10 В — максимальное напряжение управления;
![]() - максимальная скорость механизма, рад/с.
- максимальная скорость механизма, рад/с.
![]() (5.8)
(5.8)
Коэффициент обратной связи по току Кот :
Кот = Кдт ∙ Кш = 102,04∙0,0006 = 0,061 (5.9)
где Кдт - коэффициент датчика тока;
 (5.10)
(5.10)
где Кш - коэффициент шунта.
Выбран шунт: тип 75 ШСН-5;
Номинальный ток: Iнш = 75А;
Номинальное падение напряжения: Uнш = 0,045 В.
Коэффициент шунта Кш определяем по формуле:
 , (5.11)
, (5.11)
Коэффициент обратной связи по напряжению Кон :
 (5.12)
(5.12)
Выходной координатой объекта управления является угловая скорость вращения ωо , а промежуточными: якорный ток, ЭДС двигателя, напряжение якорной обмотки, электромагнитный момент, магнитный ток.
3. Синтез CA У
Для обеспечения требуемых статических и динамических параметров определим структуру системы.
Поскольку необходимо регулировать скорость и требуется динамика, то система должна иметь контур скорости и контур тока. Настройку контура обычно производят так, чтобы получить технически оптимальный переходный процесс, т.е. настройка на технический оптимум.
3.1 Расчет контура тока
Регулятор тока организован по ПИ-закону управления с настройкой на модульный оптимум. Регулятор для обеспечения требуемых динамических параметров должен компенсировать электромагнитную постоянную Тя , а также малую постоянную времени контура тока Т01 (рисунок9).
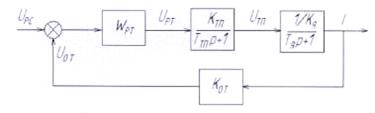
Рис. 3- Структурная схема по току
Передаточная функция регулятора тока имеет вид:
![]() (6.1)
(6.1)
где Кр m - пропорциональная часть регулятора тока;
![]() - постоянная времени регулятора тока.
- постоянная времени регулятора тока.
 (6.2)
(6.2)