Курсовая работа: Расчет тиристорного электропривода
где ![]() - малая постоянная времени токового контура.
- малая постоянная времени токового контура.
Тот = 2 ∙ Ттп = 2 ∙ 0,01= 0,02 с, (6.4)
Согласно рисункам 4 и 5 запишем уравнения соответствия
динамических параметров системы и физических параметров схемы реализации:
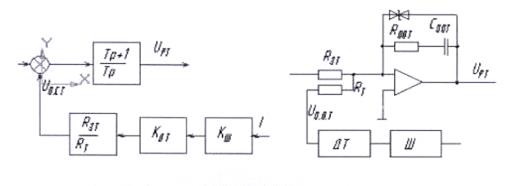
Рис. 4 -Структурная схема РТ Рис. 5- Принципиальная схема РТ
Зададимся емкостью конденсатора Cост = 1 мкФ = 0,000001 Ф, тогда согласно уравнению 2 системы 6.5, сопротивление Rост составит:
 , (6.6)
, (6.6)
Представив значение Сост = 1 мкФ в уравнение 3 системы 6.5, найдем сопротивление Rзт по формуле:
 (6.7)
(6.7)
Подставив значение Rзт в 1 - е уравнение системы 6.5, получим, что сопротивление Rт составит:
 (6.8)
(6.8)
По расчетам принимаем тип резисторов. Выбираем резисторы серииМЛТ.
Номинальная мощность: 0,125-2 Вт;
Диапазон сопротивления: 8,2 Ом – 10 МОм;
Рабочая температура: 125С0 ;
Допустимые отклонения: 5, 10, 20.
Датчик тока предназначен для преобразования тока якоря пропорциональное ему напряжение и включает в себя датчик и согласующее устройство. В качестве измерительного преобразователя в датчике использован шунт. В качестве элемента гальванической развязки принимаем микросхему оптоэлектронную полупроводниковую, состоящую из оптопар и транзисторных прерывателей типа К249, КН1Г. Выходное напряжение равно 3,5 В, входной ток равен 20 мА. На выходе датчика должно быть напряжение 10В.
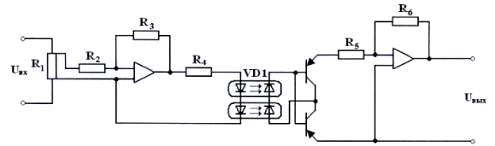
Рис. 6 - Принципиальная схема датчика тока
3.2 Расчет контура скорости
Регулятор скорости организован по пропорциональному принципу (П) закону управления с настройкой на модульный оптимум. Регулятор для обеспечения требуемых динамических параметров должен компенсировать электромеханическую постоянную времени системы Тм , а также малую постоянную времени контура скорости Тос (рисунок 6).
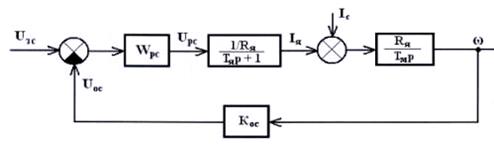
Рис. 7- Структурная схема контура скорости Передаточная функция регулятора скорости будет иметь вид:

где Тос - малая постоянная времени контура скорости.
Тос = 2∙ Тот = 4∙ Ттп = 4∙ 0,01 = 0,04 с,
Приведем схему реализации регулятора скорости (рисунок 9).