Курсовая работа: Разработка и исследование динамических характеристик САУ мехатронными модулями
Показатели устойчивости:
HM = 16;
–HM = –14;
KЖ = K = 509;
20·lg(KЖ) = 20·lg(509) = 59,13;
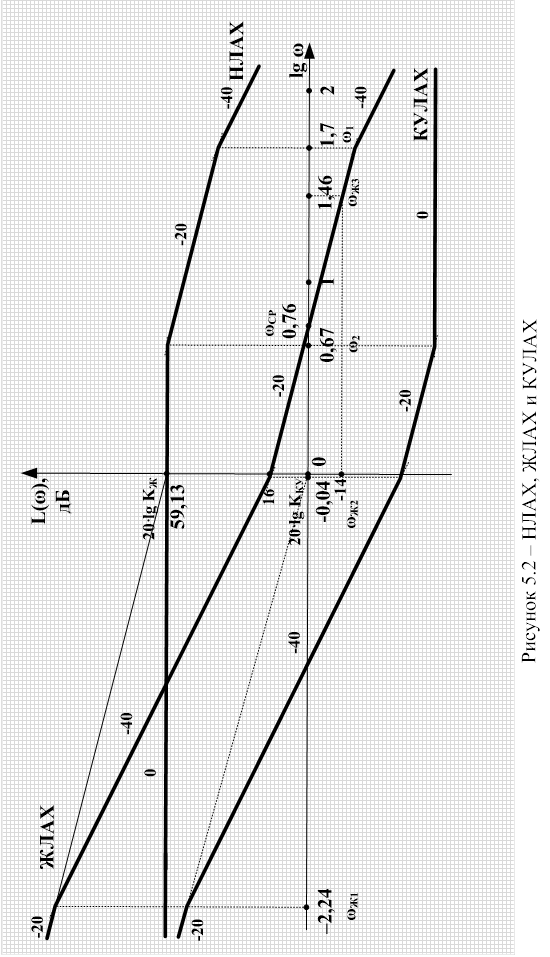
Строим желаемую логарифмическую амплитудную характеристику (ЖЛАХ) (рисунок 5.2).
Найдем корректирующее устройство. Чтобы построить ЛАХ корректирующего устройства (КУЛАХ) необходимо вычесть неизменяемую ЛАХ из желаемой.
Из графика рисунка 5.2 видно, что:
lgωЖ1 = –2,24; ![]()
lgωЖ2 = –0,04; ![]()
lgωЖ3 = 1,46; ![]()
20∙lg(KКУ) = 0; ![]() .
.
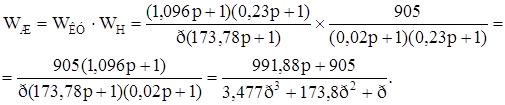
Таким образом, получили, что передаточная функция корректирующего устройства имеет вид:
![]()
![]() .
.
6 АНАЛИЗ СИНТЕЗИРОВАННОЙ САУ ПО УСТОЙЧИВОСТИ, КАЧЕСТВУ И ТОЧНОСТИ.
Рисунок 6.1 – Структурная схема желаемой САУ
|
|
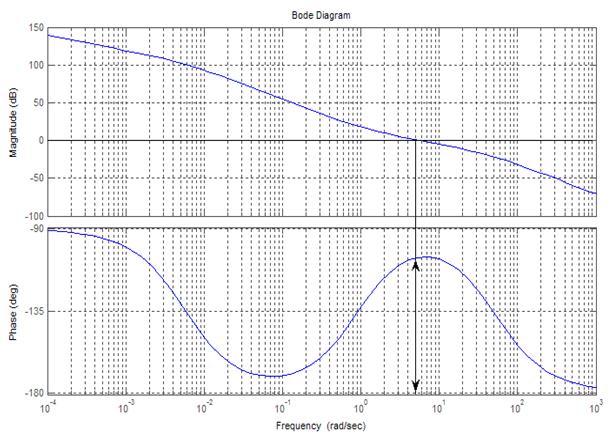
Рисунок 6.2 – ЛАХ и ЛФХ синтезированной САУ
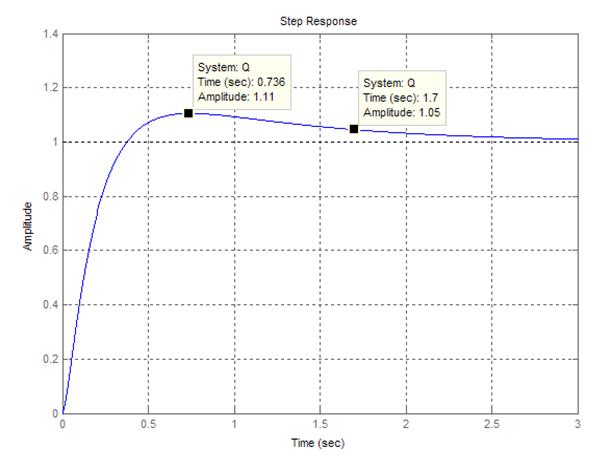
Рисунок 6.3 – Переходный процесс синтезированной системы
По рисунку 6.2, определяем:
Запас устойчивости по фазе: φ = 149°;
Запас устойчивости по амплитуде: h→ ∞, т.к ЛФХ → –180˚.
По рисунку 6.3, определяем:
Время перерегулирования: tp = 1,7 с;
Коэффициент перерегулирования:  ;
;
Число колебаний: М = 1.
Точность регулирования определяется ошибкой системы.
Передаточная функция ошибки:
![]()
где: g(t) – единичный входной сигнал,
С0 – коэффициент ошибки по входному воздействию,
С1 – коэффициент ошибки по скорости,