Курсовая работа: Разработка и исследование динамических характеристик САУ мехатронными модулями
Так как система обладает астатизмом первого порядка с начальным наклоном –20 дБ/дек., то:
С0 = 0; С1 = 1/DV; С2/2=1/DE,
где: DV – добротность по скорости;
DE – добротность по ускорению.
DV = ωV; DE =![]() .
.
По рисунку 5.2 определяем ωV и ωE.
lg(ωV) = 2,957; ωV = 905;
lg(ωE) = 0,36; ωE = 2,29;
DV = 905; DE = 2,29;
C1 = 1/ DV = 0,0011;
C2/2 = 1/ DE = 0,437.
![]()
ε(t) = 0.
7 СИНТЕЗ АНАЛОГОВОЙ СХЕМЫ И РАСЧЕТ ПАРАМЕТРОВ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
По виду передаточной функции корректирующего устройства определим схему корректирующего устройства.
![]()
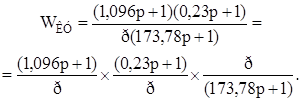
![]() Выбираем электрическую схему, передаточную функцию типового корректирующего устройства. Она будет содержать в себе следующие электрические схемы:
Выбираем электрическую схему, передаточную функцию типового корректирующего устройства. Она будет содержать в себе следующие электрические схемы:
1. Передаточная функция корректирующего звена [2, 474 стр.]:
![]() k = 1 / R1 ∙ C; T = R2 ∙ C.
k = 1 / R1 ∙ C; T = R2 ∙ C.

Рисунок 7.1 – Схема корректирующего звена
Таким образом, получили, что:
R1 = 10 Ом; R2 = 10,96 Ом; C = 0,1 Ф.
2. Передаточная функция корректирующего звена [2, 474 стр.]:
![]() k = 1 / R1 ∙ C; T = R2 ∙ C.
k = 1 / R1 ∙ C; T = R2 ∙ C.
Рисунок 7.2 – Схема корректирующего звена
Таким образом, получили, что:
R1 = 10 Ом; R2 = 2,3 Ом; C = 0,1 Ф.
3. Передаточная функция корректирующего звена [2, 474 стр.]:
![]() k = R2 · C; T = (R1 + R2) ·C.
k = R2 · C; T = (R1 + R2) ·C.

Рисунок 7.3 – Схема корректирующего звена
Таким образом, получили, что:
R1 = 1727,8 Ом; R2 = 10 Ом; C = 0,1 Ф.