Курсовая работа: Разработка системы непрерывного управления координатами электропривода с заданными показателями качества
![]() .
.
Задаваясь временем регулирования определяем базовую частоту
 .
.
Далее находим матрицу К коэффициентов обратных связей по переменным состояния

Проведя эксперимент, с помощью пакета MATLAB уточним значения коэффициентов обратных связей, подобрав следующие значения:
![]() ,
,  ,
,  .
.
3. Расчет статических и динамических характеристик
Расчет характеристик произведем с помощью пакета MATLAB 5. Модель MATLAB представлена на Рис. 2.
Ниже приведены результаты моделирования в виде графиков.
Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
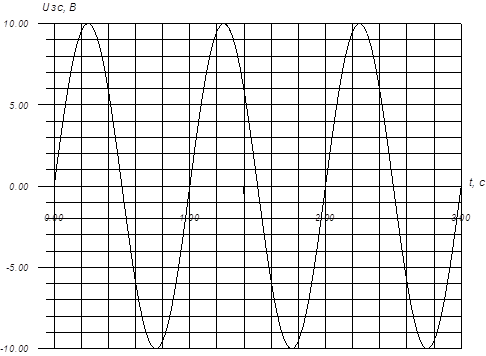
а) Задание скорости

б) Отработка задания

в) Изменение ошибки
Рис. 3
Как видно из приведенных выше графиков ошибка между заданием на скорость и отработкой задания недопустимо велика и, кроме того, между заданием скорости и отработкой задания есть еще и фазовый сдвиг. Для уменьшения ошибки слежения и исключения фазового сдвига скорректируем систему, введя дополнительное задание по производной скорости как показано на Рис. 4.

Рис. 4
Проведя ряд экспериментов, установим также, что постоянная времени Т имеет линейную зависимость от частоты гармонического задания скорости. Вид этой зависимости представлен на Рис. 5 ниже.
График зависимости постоянной времени Т от частоты гармонического задания скорости.

Рис. 5
Далее приведены результаты моделирования уже скорректированной системы. Из этих графиков видно, что требования, указанные в задании на проект выполняются.
Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).

а) Задание скорости