Курсовая работа: Разработка системы непрерывного управления координатами электропривода с заданными показателями качества
б) Отработка задания

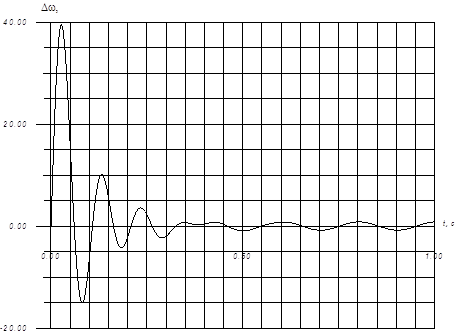
в) Изменение ошибки

г) Скорость двигателя

д) Ток двигателя

е) Упругий момент
Рис. 6
Поведение системы при гармоническом задании, частота 5 Гц амплитуда 4 В (75.4 рад/с).

а) Задание скорости
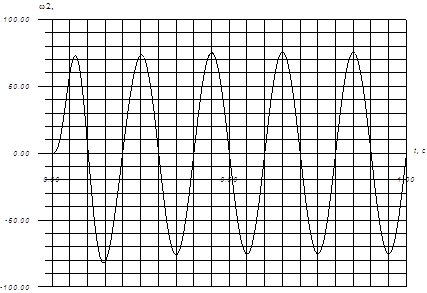
б) Отработка задания
в) Изменение ошибки

г) Скорость двигателя

д) Ток двигателя

е) Упругий момент
Рис. 7
4. Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов
Выбираем прецизионные операционные усилители DA1…DA9 серии КР540УД17А с параметрами: Uпит=±15 В, Iпотр=5 мА, напряжение смещения Uсм=0.03 мВ. Для аналогового перемножителя берем микросхему КР525ПС2А.
Для предотвращения обратной связи по питанию для всех микросхем применяем блокировочные конденсаторы С6…С25 серии К10-17-25В-0.1мкФ.
Для синтеза обратных связей по скоростям 1-ой и 2-ой массы применим тахогенераторы ТП80-20-0.2.
Для согласования выходного напряжения тахогенератора с системой управления применим делитель, представленный на Рис. 8.
