Курсовая работа: Разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи
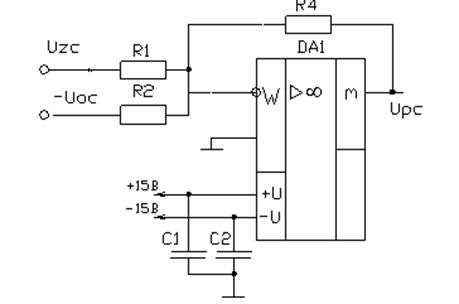
рис.6
Выбираем R1 – 10 кОм, тогда для реализации Крс=10:
![]()
Для создания обратной связи по скорости первой массы применим тахогенератор ТП50-100-1 с параметрами Uмах=150 В Þ в нашем случае примем, что на максимальной скорости тахогенератор вырабатывает 75 В. Jp=360*10-7 кгм2 , Мтр=270*10-4 Нм. Видно, что момент инерции ротора тахогенератора и дополнительный момент сопротивления настолько малы по сравнению с основными параметрами системы, что ими можно пренебречь.
![]()
Для согласования выходного напряжения тахогенератора с системой управления, применим делитель, представленный на рис.7

рис.7
Примем R5=10 кОм Þ
![]()
![]()
Итак:
R1, R5 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.25-13кОм±0.5%
R4 – C2-29B-0.5-100кОм±0.5%
R6 – два параллельно соединенных C2-29B-0.5-130кОм±0.5%
С1, С2 – блокировочные конденсаторы (см. выше)
DA1 – КР140УД25А.
Реализация сумматора (с коэффициентом усиления Кку=30).
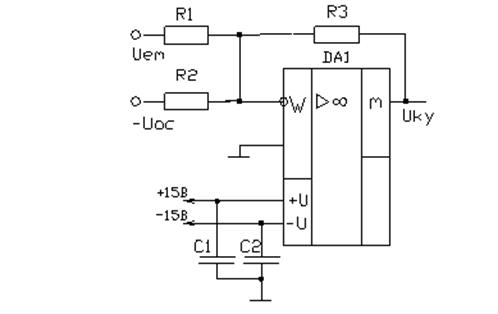
рис.8
Выбираем R1=10 кОм Þ
![]()
R1 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.5-100кОм±0.5%
R6 – C2-29B-1-300кОм±0.5%
DA1 – КР140УД25А.
Реализация сумматора с ограничением сигнала.