Курсовая работа: Разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи
$Кон
$Стоп
Результаты моделирования представлены в виде графиков:
1.Пуск на минимальную скорость при минимальном моменте сопротивления (Uy=1, Mc=30 Нм)
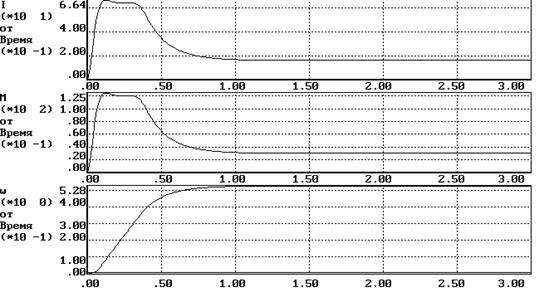
Время регулирования (время вхождения в пятипроцентный коридор) tр=0.2 с;
Перерегулирование s=0.2%;
Ошибка DWуст=0.038рад (DWмах=0.0524 рад)
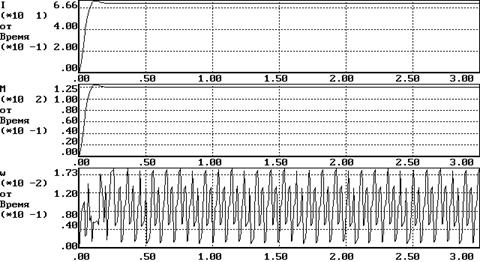
2.Пуск на минимальную скорость при максимальном моменте сопротивления (Uy=1, Mc=150 Нм)
3.Пуск на максимальную скорость при минимальном моменте сопротивления (Uy=10, Mc=30 Нм)
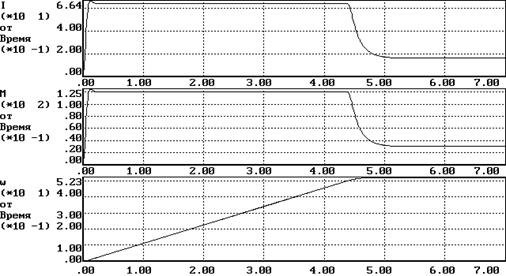
Время регулирования (время вхождения в пятипроцентный коридор) tр=0.5 с;
Перерегулирование s=1%
Ошибка DWуст=0.41рад (DWмах=0.52 рад);
4.Пуск на максимальную скорость при максимальном моменте сопротивления (Uy=10, Mc=150 Нм)
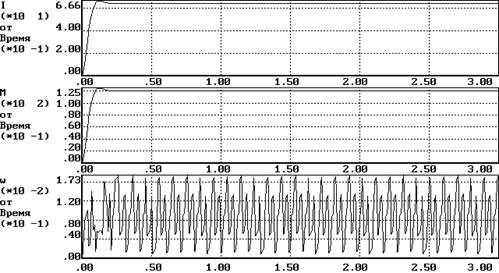
Как видно из приведенных графиков, результаты не только не удовлетворяют техническому заданию, но и смоделированная структура не отражает в полном объеме свойств системы.
Заменим в структуре постоянные коэффициенты См, Се, R на переменные, в соответствии со следующими формулами:
 ,где S, g, Id – переменные.
,где S, g, Id – переменные.
Для улучшения свойств системы, введем адаптивный регулятор с эталонной моделью, формирующей оценку управляющей координаты при настройке контура на технический оптимум с постоянной времени Тm=0.002 с.
Передаточная функция эталонной модели составляет два последовательно соединенных звена ![]() ,
, ![]() , охваченных отрицательной единичной обратной связью. Передаточная функция замкнутого контура ЭМ имеет вид:
, охваченных отрицательной единичной обратной связью. Передаточная функция замкнутого контура ЭМ имеет вид:
![]()
Суммарная структурная схема представлена на рис.4.
В процессе моделирования экспериментально подбираем значения следующих коэффициентов:
Коэффициент П - регулятора скорости (Крс=10),
Коэффициент усиления адаптивного регулятора (Kку=30).
Листинг модели.
$ввод