Курсовая работа: Разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи
S’н – номинальное скольжение на этой характеристике;
Мн – момент нагрузки (для точки А равен 30 Нм).
Находим номинальное скольжение S’н = 0.95
С помощью программного пакета MATHCAD находим значение критического скольжения на характеристике 2: S’k =7.27 , тогда:
R2’max= S’k *Xk=7.27*1.38=10.03 Ом;
R2’д=R2’maх-R2’=10.03-0.4=9.63 Ом;
R2д= R2’д/Kr=9.63/1.21=7.96 Ом.

Рис.2
Приведем эквивалентную схему замещения объекта управления относительно выпрямленного тока Id:

![]() - скважность;
- скважность;
 , где:
, где:
Kcx – коэффициент схемы, принимаем равным 1.35
3. Разработка алгоритма управления и расчет параметров элементов структурной схемы
Согласно эквивалентной схеме замещения запишем следующие дифференциальные уравнения:
![]()

где: ![]()
Данный объект нелинейный, т.к. присутствуют g*Id, Id2 и т.д. Рассмотрим линеаризацию объекта, и запишем уравнения в приращениях:

где: ![]()
![]() .
.
Целесообразно использовать двухконтурную систему подчиненного регулирования координат с внутренним контуром выпрямленного тока. Исходя из линеаризованных дифференциальных уравнений, получим следующую структуру (рис.3):

рис.3
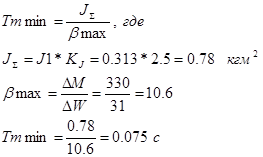
Данная структура представлена в общем виде. Определяем параметры объектов: Рассчитаем максимальную электромагнитную постоянную времени и минимальную электромеханическую постоянную, и определим их соотношение:
![]()
Найдем отношение постоянных времени:
![]()