Курсовая работа: Разработка системы управления механизма передвижения тележки
2.11 Динамический расчет системы привода
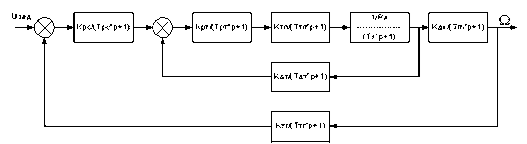
Рассмотрим динамическую модель разработанной приводной системы:
Исходные данные для расчета:
|
|
|
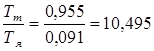
В системе электроприводов ПР момент инерции нагрузки изменяется, а, следовательно и механическая постоянная времени Тm тоже будет изменяться. При ![]() обычно корни характеристического уравнения комплексно-сопряженные и переходные процессы носят колебательный характер. При
обычно корни характеристического уравнения комплексно-сопряженные и переходные процессы носят колебательный характер. При ![]() корни действительные, что соответствует апериодическим переходным процессам. При
корни действительные, что соответствует апериодическим переходным процессам. При ![]() влияние Тя можно пренебречь, переходные процессы близки к экспоненциальным.
влияние Тя можно пренебречь, переходные процессы близки к экспоненциальным.
 (2.56)
(2.56)
Передаточные функции звеньев имеют вид:
- регулятор скорости ![]() ;
;
- регулятор тока ![]() ;
;
- двигатель ![]() ; (2.57)
; (2.57)
- ТП ![]() ;
;
- тахогенератор ![]() ;
;
- датчик тока ![]() .
.
Для определения устойчивости относительно задающего воздействия по критерию Найквиста необходимо разорвать цепь обратной связи и определить передаточную функцию в разомкнутом состоянии.
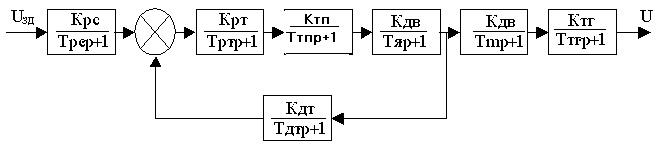
Схема разомкнутой динамической системы привода имеет вид
![]() ,
,
![]() . (2.58)
. (2.58)
Передаточная функция разомкнутой системы будет иметь вид
![]() . (2.59)
. (2.59)
Построим ЛАЧХ и ЛФЧХ исходной разомкнутой системы
![]() , (2.60)
, (2.60)
 ,
,
![]() , (2.61)
, (2.61)
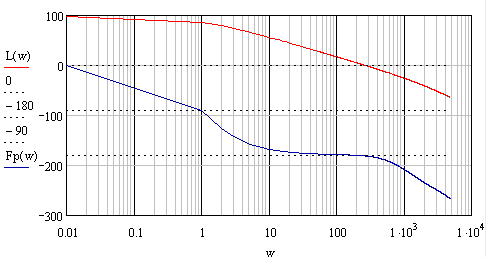
Рисунок 2.4 – ЛАЧХ и ЛФЧХ исходной системы
Определим частоту среза
![]() ,
, ![]() . (2.62)
. (2.62)
Построим желаемую ЛАЧХ и определим форму корректирующего звена.
Для построения желаемой ЛАЧХ определим желаемую частоту среза.
![]() , где b=4,5 – коэффициент Солодовникова.Wж =100. (2.63)
, где b=4,5 – коэффициент Солодовникова.Wж =100. (2.63)
Введение
Свойства электромеханической системы определяются взаимосвязанными характеристиками элементов и образующих её подсистем (механической, электрической и магнитной). Поэтому при этапном проектировании электромеханической системы особое внимание уделяется выбору электромеханической элементной базы, электродвигателей и информационных и силовых полупроводниковых преобразователей, статических и динамических характеристик, как силовых исполнительных элементов, так и системы
Построим ЛАЧХ и ЛФЧХ исходной разомкнутой системы
![]() , (2.60)
, (2.60)
 ,
,
![]() , (2.61)
, (2.61)

Рисунок 2.4 – ЛАЧХ и ЛФЧХ исходной системы
Определим частоту среза
![]() ,
, ![]() . (2.62)
. (2.62)
Построим желаемую ЛАЧХ и определим форму корректирующего звена.
Для построения желаемой ЛАЧХ определим желаемую частоту среза.
![]() , где b=4,5 – коэффициент Солодовникова.Wж =100. (2.63)
, где b=4,5 – коэффициент Солодовникова.Wж =100. (2.63)

Рисунок 2.5 – Желаемое ЛАЧХ
Корректирующее звено можно реализовать следующим звеном:
![]() , (2.64)
, (2.64)
В итоге передаточная функция скорректированной системы будет иметь вид:
![]() , (2.65)
, (2.65)
![]() ,
,
![]() .
.
Построим ЛАЧХ и ЛФЧХ разомкнутой системы
![]() , (2.66)
, (2.66)
 , (2.67)
, (2.67)

Рисунок 2.6 – ЛАЧХ и ЛФЧХ скорректированной системы
![]() , (2.68)
, (2.68)
Запас устойчивости по фазе ![]() мин.запас-30..40 гр.
мин.запас-30..40 гр.
Запас устойчивости по амплитуде![]() , мин.запас - (-8..-10) дБ.
, мин.запас - (-8..-10) дБ.