Курсовая работа: Разработка цифрового фазового корректора
Студент Тришин С.В.
Группа 114 специальность 2007
2004
Содержание
1. Постановка задачи (введение)
2. Формализация задачи
3. Разработка и описание общего алгоритма функционирования устройства
4. Обоснование аппаратной части устройства
5. Разработка и отладка программы на языке команд микропроцессора
6. Составление и описание электрической принципиальной схемы устройства
7. Расчёт быстродействия устройства
8. Расчёт АЧХ и ФЧХ устройства для заданных и реальных значений коэффициентов. Оценка устойчивости устройства
9. Заключение
10. Список использованных источников
1. Постановка задачи (введение)
Цифровая обработка сигналов , т.е. обработка сигналов с помощью средств электронной вычислительной техники ,стала известна около 35 лет назад. Электронные вычислительные машины тогда были дороги и несовершенны и поэтому их применяли лишь в сложных радиокомплексах , например, при расчете координат и траекторий объектов в радионавигационных системах слежения за космическими объектами , при расчете координат цели в радиолокационных станциях.
В последующие годы благодаря широкому применению транзисторов а затем и развитию микроэлектроники ЭВМ стали совершеннее, дешевле, а главное, компактнее. Появилась возможность использования вычислительной техники в сравнительно простой аппаратуре, например, в специальных радиоприемниках, системах фазовой подстройки частоты, системах телеметрии и т.д. С помощью цифровых устройств можно реализовать очень сложные алгоритмы обработки сигналов, которые трудно, а часто даже невозможно реализовать, используя обычную аналоговую технику. Алгоритм обработки сигналов можно изменять в зависимости от характера входного сигнала. Следовательно, легко построить самонастраивающуюся (адаптивную) систему. Цифровые фильтры могут анализировать параметры сигнала и принимать те или иные решения , например, вырабатывать управляющие команды. С помощью цифровых методов можно реализовать любой алгоритм обработки сигнала , который может быть описан совокупностью арифметических и логических операций. Точность обработки сигнала цифровыми фильтрами определяется точностью выполняемых расчетов. Она может быть несоизмерима выше точности обработки сигнала в аналоговых фильтрах. Одним из источников погрешности аналоговых фильтров является нестабильность их параметров , вызываемая колебаниями температуры , старением , дрейфом нуля , изменением питающих напряжений и т.д. В цифровых фильтрах эти неприятные эффекты отсутствуют. При разработке цифровых фильтров не возникает задача согласования нагрузок. Недостатком цифровых фильтров является их большая сложность по сравнению с аналоговыми , более высокая стоимость и не очень высокое быстродействие. В последние годы в связи с появлением микропроцессоров цифровая обработка сигналов получила еще более широкое распространение. Для цифровых фильтров стало возможным построение разнообразных частотных характеристик , путем их аналитической задачи. При этом реализуемы и фильтры традиционных типов: нижних частот, верхних частот, полосовые и режекторные.
В данном курсовом проекте необходимо реализовать цифровой фазовый корректор, основой которого служит однокристальный микропроцессор К1821ВМ85 (ВМ85). Данный МП является усовершенствованной версией МП КР580ВМ80 (ВМ80). МП ВМ85 более экономичный (технология КМОП), использует только один источник питания (+5 В), имеет мультиплексированную шину адреса/данных, расширенные возможности обработки прерываний. На примере данного МП легко построить дешевые и компактные устройствам , в ряду которых фазовый корректор с требуемыми характеристиками.
Обработка должна происходить в реальном масштабе времени. При проектировании следует придерживаться двух критериев: минимальная аппаратная конфигурация устройства и минимальное время операций обработки сигнала (вычисления). При определенных условиях эти критерии противоречат друг другу.
2,.Формализация задачи
Минимальная конфигурация МП-системы на основе набора К1821 (К1821ВМ85, КР1821РФ55,КР1821РУ55 ) , совместно с ЦАП 572ПА1 и вспомогательными элементами определяет функциональную схему фазового корректора, которая представлена на рис.1.
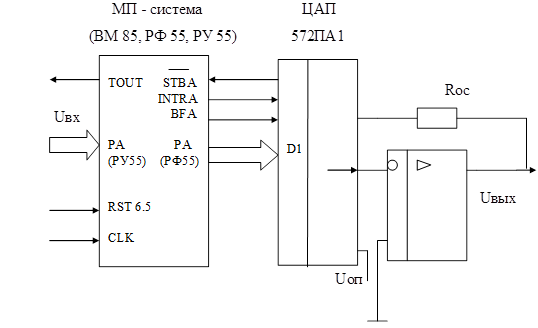
Рис. 1. Функциональная схема проектируемого фильтра
Входное напряжение в виде кода поступает в порт PA БИС РУ55. Частота дискретизации ![]() =8.0кГц формируется аппаратным таймером РУ55 , в котором частота переполнения
=8.0кГц формируется аппаратным таймером РУ55 , в котором частота переполнения ![]() в режиме 3 , равна
в режиме 3 , равна ![]() . При использовании в качестве входных импульсов таймера тактовых импульсов CLKМП - системы (
. При использовании в качестве входных импульсов таймера тактовых импульсов CLKМП - системы (![]() =1.5МГц ) исходное состояние таймера равно:
=1.5МГц ) исходное состояние таймера равно:
![]()
16-разрядный двоичный код содержит два бита (T15 и T14) задающих режим работы таймера. Для третьего режима работы необходимо в эти биты записать единицы.
Получаем код:
Байты ![]() и
и ![]() загружаются при инициализации системы (фильтра).
загружаются при инициализации системы (фильтра).
Необходимость хранения данных вытекает из вида разностного уравнения. Уравнение использует входную выборку отсчетов (![]() ) и выходную (
) и выходную (![]() ). Все выборки должны быть доступны для вычислений , а следовательно, должны храниться в памяти МП - системы. Требуется также вычислить четыре текущих произведения (
). Все выборки должны быть доступны для вычислений , а следовательно, должны храниться в памяти МП - системы. Требуется также вычислить четыре текущих произведения (![]() ) и сохранить их в памяти. После вычисления выходного
) и сохранить их в памяти. После вычисления выходного ![]() и записи в ОЗУ , перед приемом нового входного отсчета , необходимо сдвинуть отсчеты всех выборок в памяти , (n-1) - й отсчет на место (n-2)-ого , а n -й на место (n-1)-ого. В результате вычисления разностного уравнения , можно получить результат , выходящий за пределы (-1,+1). Для исключения переполнения разрядной сетки введем масштабирование (ослабление) входных отсчетов путем их умножения на коэффициент масштабирования kМ < 1, при котором вычисление разностного уравнения никогда не дает недопустимого результата.
и записи в ОЗУ , перед приемом нового входного отсчета , необходимо сдвинуть отсчеты всех выборок в памяти , (n-1) - й отсчет на место (n-2)-ого , а n -й на место (n-1)-ого. В результате вычисления разностного уравнения , можно получить результат , выходящий за пределы (-1,+1). Для исключения переполнения разрядной сетки введем масштабирование (ослабление) входных отсчетов путем их умножения на коэффициент масштабирования kМ < 1, при котором вычисление разностного уравнения никогда не дает недопустимого результата.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--