Курсовая работа: Синтез и анализ линейных систем автоматического управления
х – величина входного воздействия,
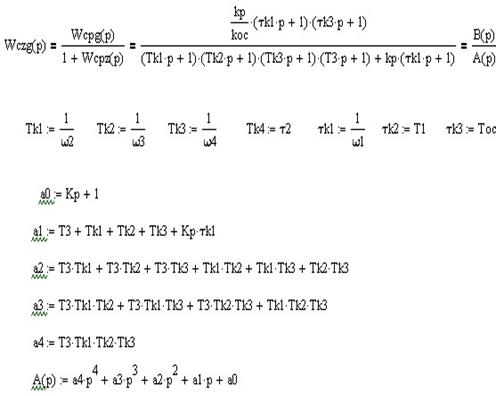
В(р) – числитель передаточной функции,
А(р) – знаменатель передаточной функции (характеристический полином),
А ![]() (р) – производная характеристического полинома,
(р) – производная характеристического полинома,
![]() – k-тый полюс передаточной функции (корень характеристического полинома),
– k-тый полюс передаточной функции (корень характеристического полинома),
n - число полюсов передаточной функции (корней характеристического полинома).
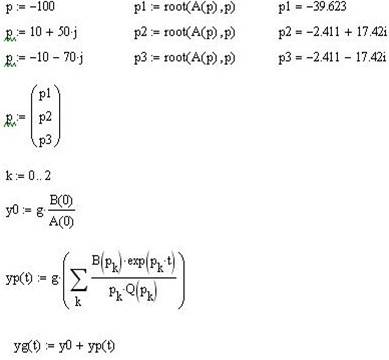
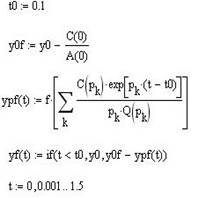
Реализация данного пункта задания курсовой работы в пакете MathCad приведена ниже. Здесь корни характеристического полинома находятся путем трехкратного применения функции root при различных приближениях. Затем из корней формируется вектор p и используется приведенная формула разложения в ее векторном варианте.
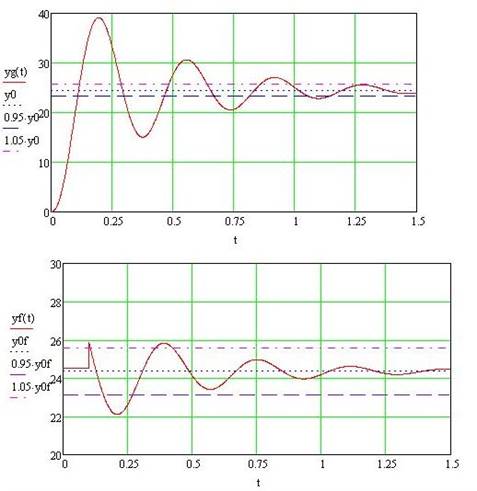
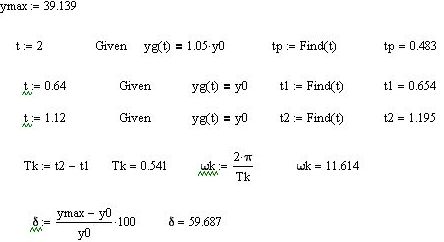
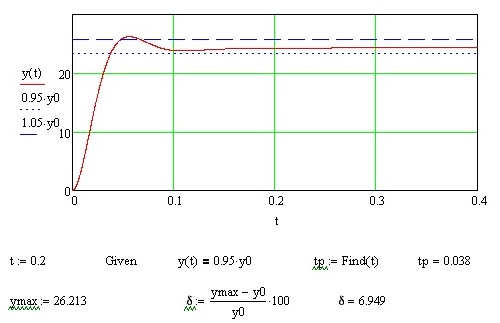
Показатели качества переходных процессов находятся непосредственно из рассчитанных характеристик; перерегулирование рассчитывается, исходя из максимального y max и установившегося y 0 значений выходной переменной, а время переходного процесса – путем решения уравнений y ( t ) =0,95· y 0 или y ( t ) =1,05· y 0 .

 |
 |
8. Синтез последовательного корректирующего устройства
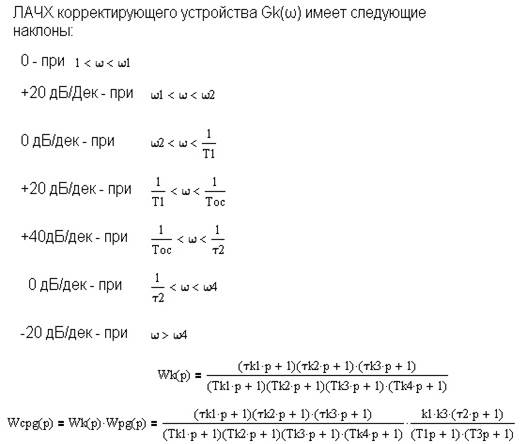
Синтез последовательного корректирующего устройства наиболее просто провести по логарифмическим частотным характеристикам. В соответствии с этим методом ЛАЧХ корректирующего устройства:
![]()
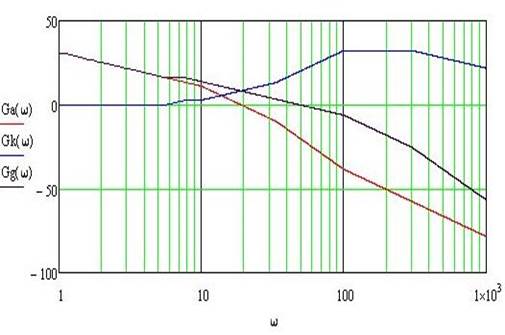
Желаемая ЛАЧХ может быть построена на основе номограмм Солодовникова. При этом выделяются три частотных области: низкочастотная, среднечастотная, высокочастотная.
Ниже приведен фрагмент расчетного файла, реализующий данный пункт курсовой работы в среде MathCad.

![]()

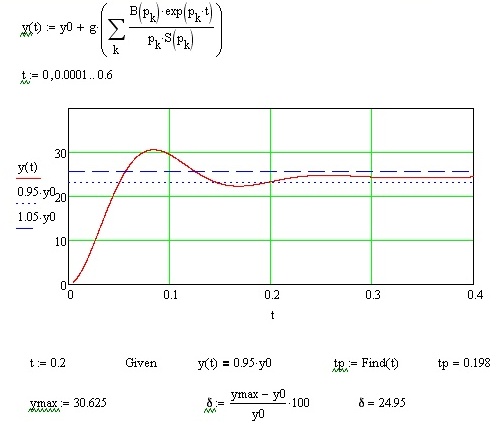
В рассчитанном варианте показатели качества регулирования хуже, чем заданные. Достижения заданного уровня показателей качества можно достигнуть путем увеличения частот ω3 и ω4 . Например, при ω3 =230 и ω4 =390 удается получить значения δ=24,95 и t пп =0,198.
Ниже приведен фрагмент расчетного файла в программном продукте MathCad, подтверждающий этот факт.
 |
Заключение
Таким образом, полученные нами в ходе данной курсовой работы показатели качества регулирования САУ путем введения в систему последовательного корректирующего устройства близки к заданным и качественно в несколько раз выше показателей исходной САУ.
Следует сделать несколько замечаний:
1) при рассматриваемом способе формирования желаемой ЛАЧХ крайне редко удается выполнить требования одновременно по двум параметрам tпп и δ;
2) рассмотренный способ коррекции САУ позволяет обеспечить заданное перерегулирование только тогда, когда постоянная времени τ2 второго звена много больше постоянных времени других звеньев САУ. Если это условие не выполняется, то перерегулирование может получиться очень большим;